Paso 6: Conecte los cables de
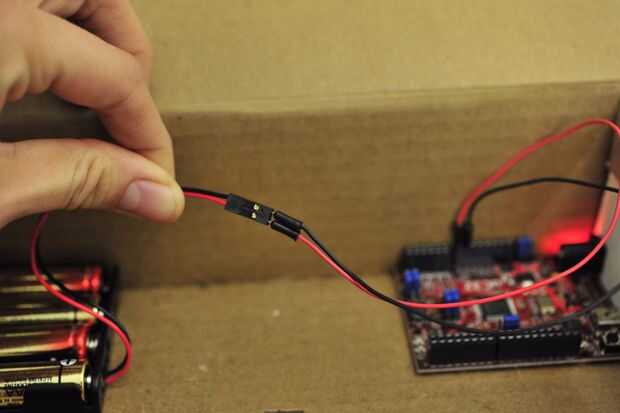
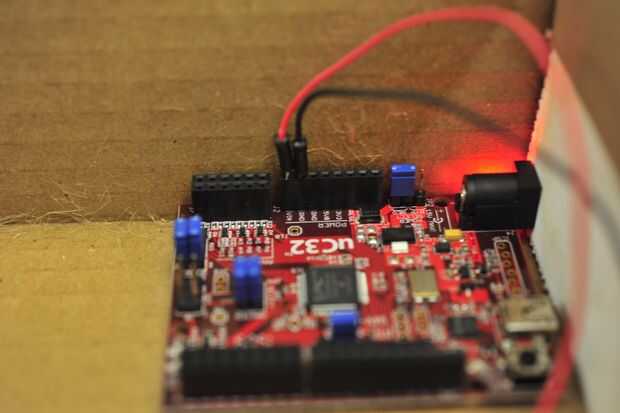
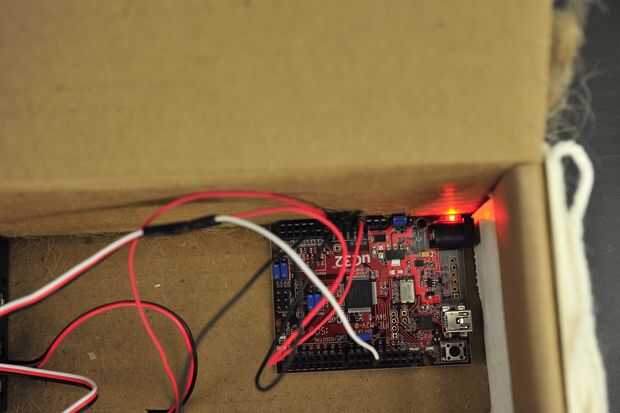
Antes de colocar el servo con ataduras de cremallera, tienes que probar el movimiento conectando todos los cables. Comenzamos conectando uno rojo y un cable protoboard negro frente a la batería roja y negra paquete de cables (ver imagen 1). El cable rojo se conecta al nuestro uC32 chipKIT para la clavija de entrada de voltaje (VIN) y el cable negro conectado a la GND pin (ver figura 2). Con estas conectado, tu uC32 chipKIT se encenderá una luz roja para indicar que la Junta está recibiendo energía. Puedes hacer otro agujero en la parte inferior de la caja ahora, similar a como lo hicimos en el paso 5: preparar el Servo. Corte un agujero para la conexión de la batería le permitirá convertir su caja y sin dañar su proyecto cuando el servo está conectado completamente y mover. Después de cortar el otro agujero, puede insertar los cables de protoboard conectados a la batería a través del orificio.
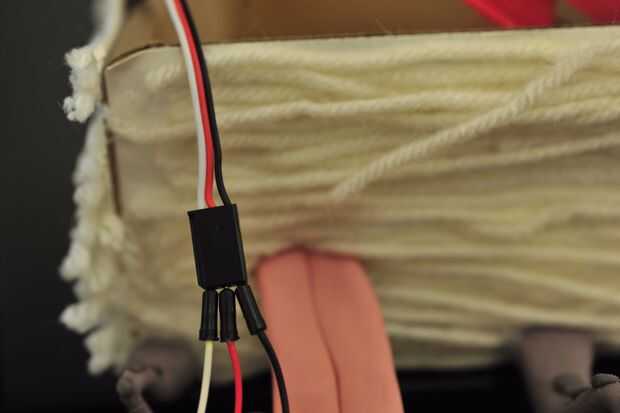
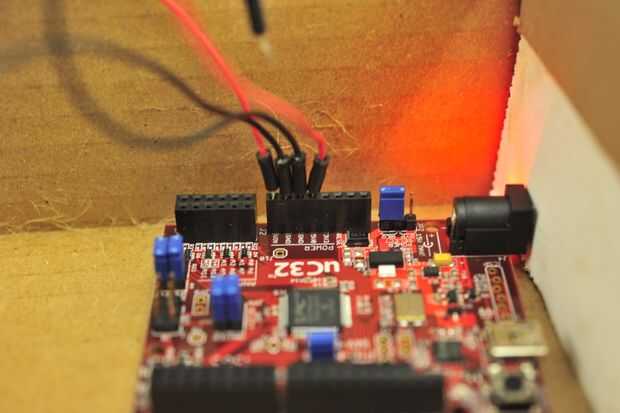
El siguiente paso es conectar el servo a su uC32 chipKIT. Como antes de que conecte el rojo, blanco y negro tablero los cables frente a los mismos colores que se extienden desde el servo (ver figura 3). Los cables rojo y negro del tablero se conectará a la cabecera de la energía en su uC32 chipKIT. El cable negro del tablero va a ser conectado junto al otro cable negro en el segundo pin GND, mientras que se conectará el cable rojo con el cable negro en la 5 voltios (5VO) perno (véase cuadro 4). Finalmente se enchufe en el cable de protoboard blanco restante pasado en la cabecera Digital PWM en el pin 11 (véase cuadro 5). Esto comenzará su trabajo motor servo como empieza a empujar la varilla de empuje (y adjunta el cuerno del servo) arriba y abajo. Si el servo no es empujar la varilla de empuje verticalmente hasta y hacia abajo, puede que necesite reajustar el cuerno blanco servo desenroscando, ajuste y enroscar el cuerno otra vez una vez en la posición correcta.



")
?")








