Paso 8: Mecanismo de la mandíbula

Corte una longitud de 50 mm de 1/4 por acción de la barra de aluminio de 1 pulgada. Perfore un agujero de 3/16 diámetro en el centro de ese miembro.
Retire las cubiertas de goma de los mangos de 2 abrazaderas mini Home Depot; Agrande los orificios del mango 3/16 de pulgada de diámetro. Coloque las abrazaderas en cada extremo del travesaño de aluminio de 50 mm y 3/dos 16 perforaciones para fijar las abrazaderas. Ver las fotos.
Fabrica de acero de espesor 1/16 (cubierta de la caja de conexiones eléctricas), una placa de conexión para las dos piernas de la abrazadera inferiores, ver fotos.
Coloque las abrazaderas en el travesaño de aluminio y conexión a la placa con 1/2 pulgada largo 10-24 tornillos de cabeza hexagonal interno botón y tuercas. Use 1 1/2 pulgada largo tornillo para fijar al travesaño al acoplamiento perno tuerca y transporte.
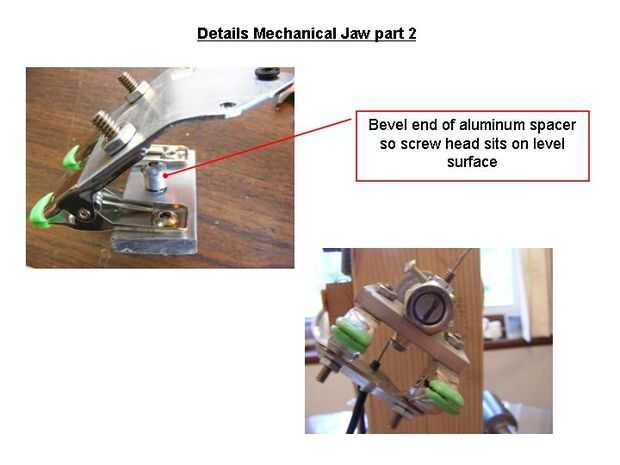
Prueba de ajuste el subconjunto de mini pinza a la tuerca de acoplamiento, usted notará una inclinación ascendente distintiva a las mordazas, para reducir esta inclinación, moler un bisel en la parte inferior del acoplamiento no, ver las fotos. 1 ½ tornillo cabeza utilice un espaciador de OD de 1/4 pulgada con un extremo biselado para proporcionar una superficie de sujeción incluso.













