Paso 4: El 'Servo Switch':
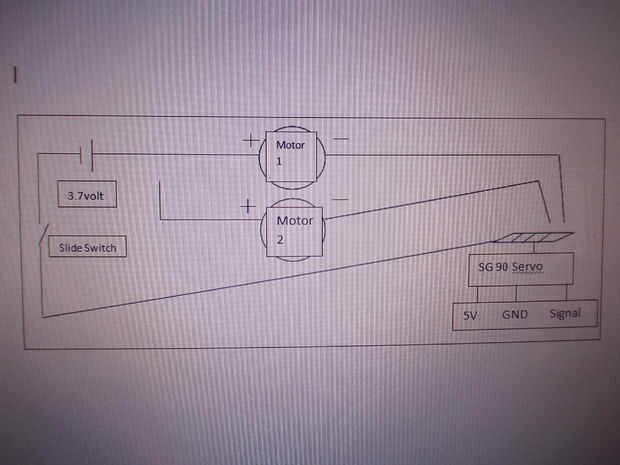
(En el diagrama la ve cable de motor 2 toques de + la + ve de la batería)
Quiero dejar una cosa clara: los 3 servo pernos vienen de Arduino y no están vinculados a este circuito.
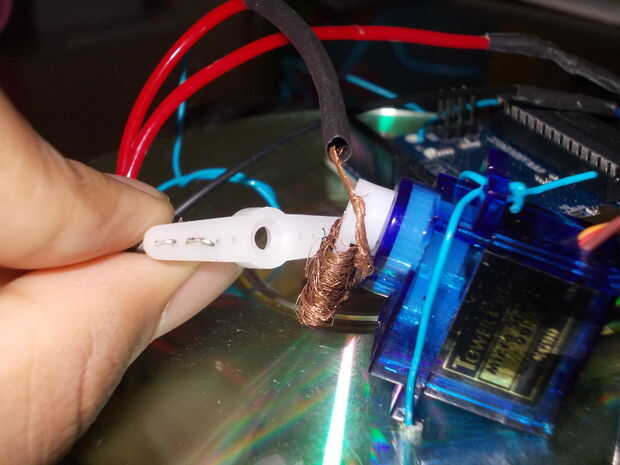
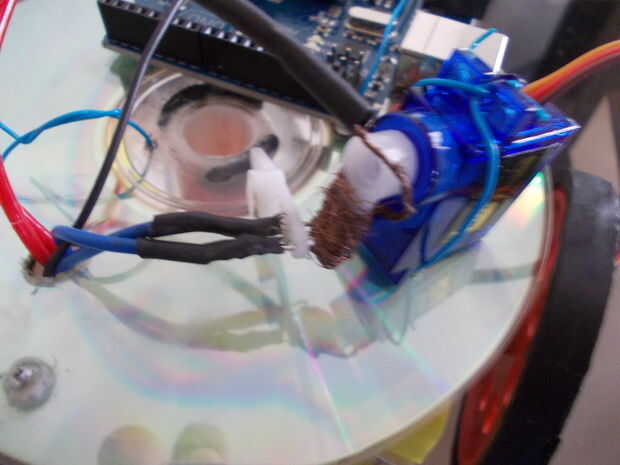
El paralelogramo en la cima del servo quede el cuerno en el que se ata el cable – ve desde el paquete de 3 voltios. Ahora bien, si el cuerno del servo y el alambre hace contacto con dos cables, el circuito se completa para ambos motores y el robot se moverá hacia delante. Pero si la bocina toca sólo un cable funcionará el motor correspondiente.
Este 'interruptor' de servo se controlará con la ayuda de la Arduino.
Esto tal vez es una técnica manual, pero es absolutamente a prueba de fallos y eficaz.
Mi idea futuro es utilizar un relé (o 2) en lugar de este mecanismo. Sólo para hacerlo un poco más ordenado!!













