Paso 6: Reguladores electrónicos

1. pico su amperaje motor debe tiene un amperaje de puesto, cuánta energía necesitan de los motores si se estancó. Una ESC también tiene un amperaje, calificación de su ESC muestra cuánta energía puede suministrar sus motores en un momento. Asegúrese de Asegúrese de grado de la ESC superior de tus motores puesto de amperaje por lo que incluso si usted consigue en una partida de empujar su ESC no dan hacia fuera.
2. peso - como regla general, en caso de duda aumentar el amperaje de tu ESC. Pero hay un retén, ESC con niveles más altos de amperaje es más pesados. Escoge una ESC muy por encima de su amperaje de parada y es ligero y lo suficientemente compacto para caber en tu robot.
3. simplicidad existen dos maneras de configurar un ESC, elegir el que usted considere que puede hacer mejor.
Las dos formas de configurar una salida diferencial de manejo (manejo de tanque por ejemplo), el método preferido de combate robótica, son:
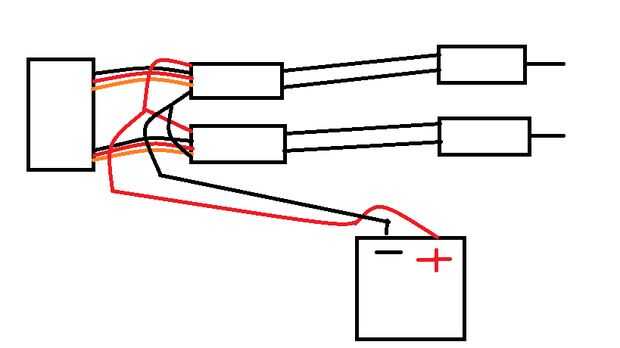
1. dos un canal de salida: dos cambialo hasta necesita dos ESC! El CSE tiene que un canal como este. Tienes que ejecutar parerell desde una sola batería y enchúfelos el receptor y motores como lo haría normalmente. (Se muestra en la imagen), también puede necesitar un mezclador V-tail si su transmisor no tiene un elevón mezcla opción.
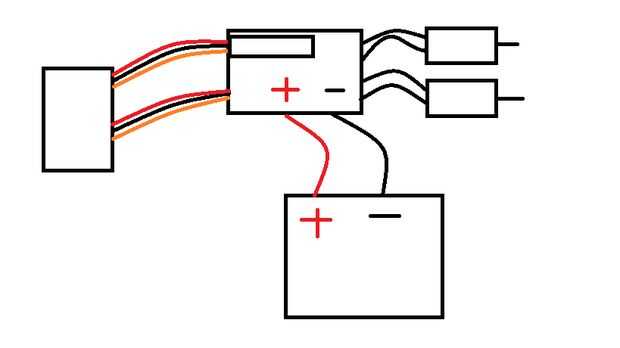
2. uno dos canales ESC-recomiendo para un primer generador de tiempo. Son muy simples de instalar y sólo se requiere uno. el siguiente diagrama le mostrará cómo instalar uno.







")
")




