Paso 4: Movimiento básico

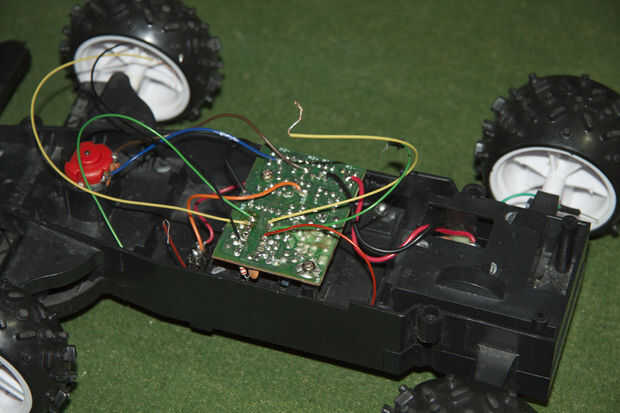
Izquierda a derecha 2 al pin 4 y hacia atrás al pin 8 del perno
EL CÓDIGO DE
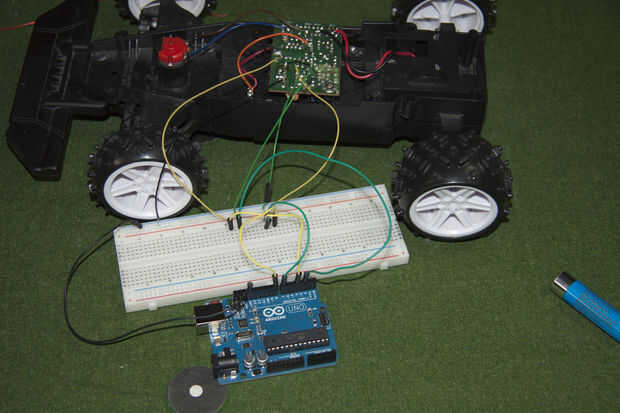
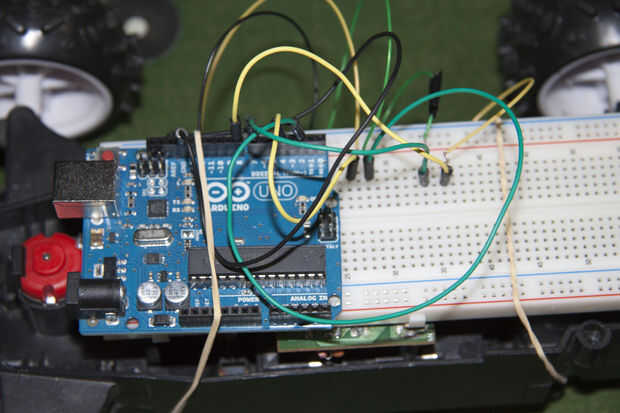
Este bosquejo pondrá a prueba a cada uno de los movimientos básicos del coche si tu coche es incapaz de realizar cualquiera de la acciones Compruebe todas las conexiones y asegúrese de que está conectada al pin correcto en el PCB y en el Arduino.
Sketch de movimientos básico: copiar y pegar o descargar el archivo en la parte inferior de la página y abrirla con Arduino.exe
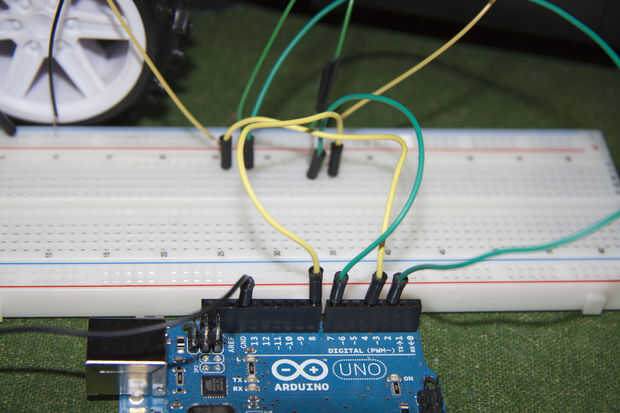
int izquierda = 2; izquierda, conectado al pin 2
int derecha = 4; derecho conectado al pin 4
int = adelante 7; adelante al pin 7
int al revés = 8; hacia atrás al pin 8
void setup() / / ocurre solamente una vez cuando está conectado el Arduino
{
ajuste todos los pernos a salidas
pinMode (a la izquierda, salida);
pinMode (a la derecha, salida);
pinMode (hacia adelante, salida);
pinMode (hacia atrás, salida);
}
creación de funciones para que no tengamos que escribir tanto
void go_forward() {}
digitalWrite (delantero, alto);
digitalWrite (hacia atrás, baja);
}
void go_backward() {}
digitalWrite (al revés, alta);
digitalWrite (delantero, baja);
}
void go_left() {}
digitalWrite (izquierda, arriba);
digitalWrite (a la derecha, baja);
}
void go_right () {}
digitalWrite (derecha, alto);
digitalWrite (a la izquierda, baja);
}
void go_stop() {/ / uso ayudo a detener porque se toma
digitalWrite (a la derecha, baja);
digitalWrite (a la izquierda, baja);
digitalWrite (delantero, baja);
digitalWrite (hacia atrás, baja);
}
void loop() {/ / ejecuta una y otra vez hasta que se apague el Arduino
go_forward();
retrasar (1000); coche se pone en marcha para un segundo
go_backward();
retrasar (1000); luego va hacia atrás por un segundo
go_right();
go_forward();
retrasar (1000); coche hará un giro a la derecha por un segundo
go_left();
go_forward();
retrasar (1000); coche hará un giro a la izquierda por un segundo
go_stop();
Delay(1000); coche se detiene por un segundo
}
DEJAR DE COPIAR AQUÍ





")







