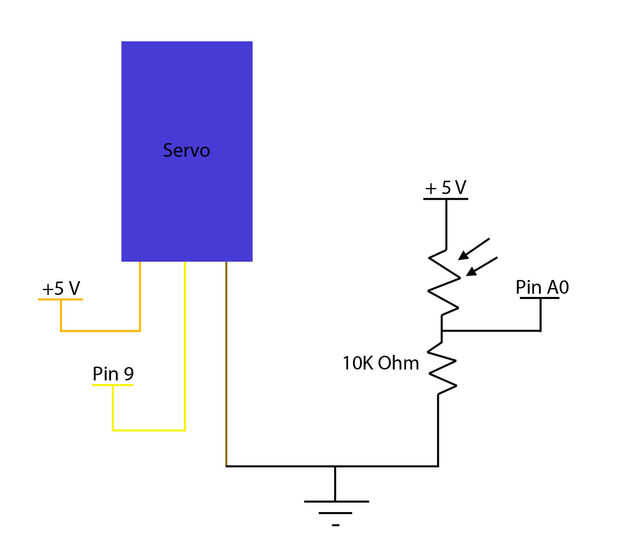
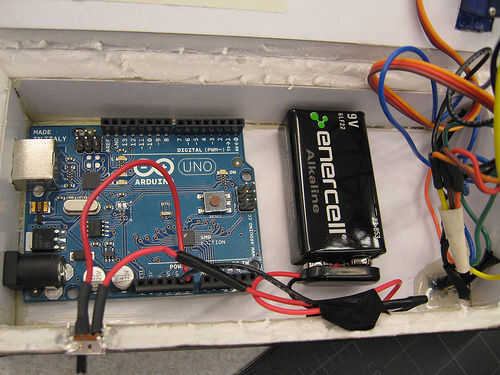
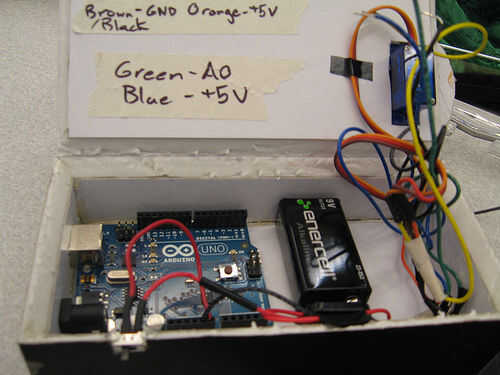
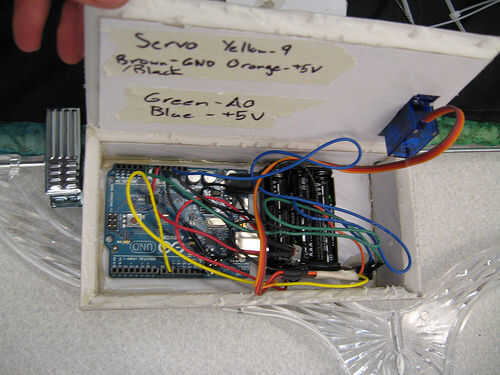
Paso 3: circuito


#include < Servo.h >
Servo myservo; crear objeto servo para controlar un servo
Apagado de int = 0; pin analógico utilizado para conectar el fotoresistor
int ledPin = 11; pin analógico para conectar a LED
void setup()
{
myservo.Attach(9); se fija el servo en el pin 9 al objeto servo
pinMode (ledPin, salida); establece el pin led en salida
Serial.Begin(9600);
}
void loop()
{
umbral de int = 400; 400 por aula, 100 para el dormitorio/dormitorio
int lightLevel = analogRead(lightPin);
Serial.println(lightLevel);
Si (lightLevel > umbral) {//if ve luz (luz = alta resistencia, oscurezca = baja resistencia)
myservo.Write (180); //forward
digitalWrite (ledPin, HIGH);
retrasar (5000); servo de centrifugado durante 5 segundos
mientras que (analogRead(lightPin) > umbral) {//while luz está todavía por encima del umbral
digitalWrite (ledPin, LOW);
myservo.Write(87); no hacer nada (sin movimiento)
Delay(10);
}
} else {//if no ve luz
myservo.Write(0); inversa
digitalWrite (ledPin, HIGH);
retardo (5000); //spin servo durante 5 segundos
mientras que (analogRead(lightPin) < umbral) {//while luz está todavía por debajo de umbral
digitalWrite (ledPin, LOW);
myservo.Write(87); no hacer nada (sin movimiento)
Delay(10);
}
}
}













