Paso 3: Conexión de IC de controlador de Motor l293d
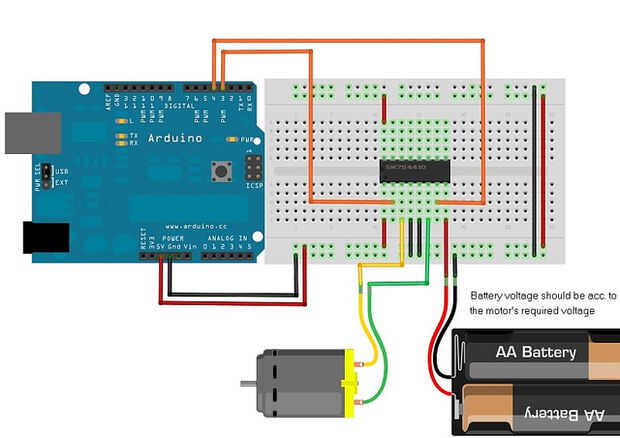
Conectar el controlador de Motor L293d en su protoboard. Conecte los pernos como sigue:-
(i) 1, 9, 16 a 5v.
(ii) 4,5,12,13 a tierra.
(iii) de los pernos 2 y 7 del IC de 8 pines y 9 de Arduino respectivamente.
(iv) 3 y 6 a los terminales del Motor1.
(v) los pernos 15 y 10 del IC de 5 y 4 o Arduino respectivamente.
(vi) 14 y 11 a terminales del Motor2.
(vii) el pin 8 del IC se debe conectar al terminal positivo de una batería externa, la tierra de la batería debe conectarse a la base común.
* El sobre el diagrama muestra sólo 1 Motor para la simplicidad, las otras conexiones son las mismas que arriba.
Subir el código a continuación.
Y compruebe si el Bot es mover en el adelante dirección o no, si su movimiento en una dirección diferente, intercambiar los números al principio del código.













")