Paso 4: Sensor de luz electrónica
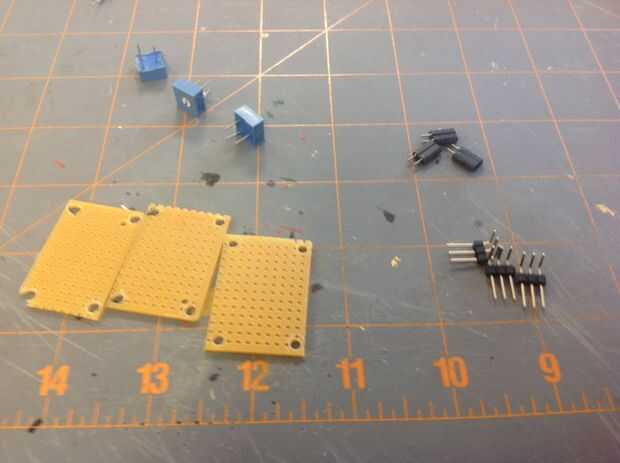
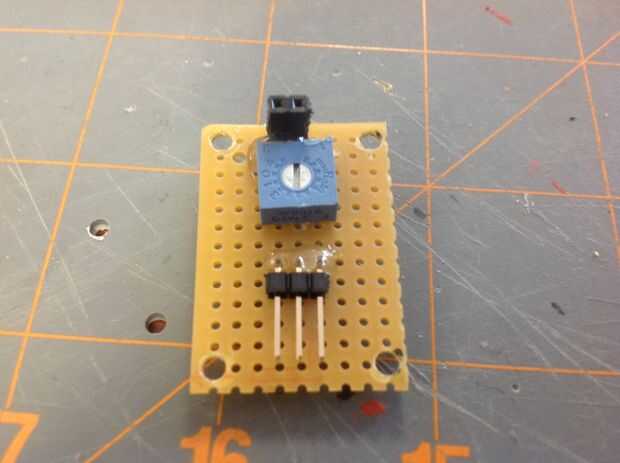
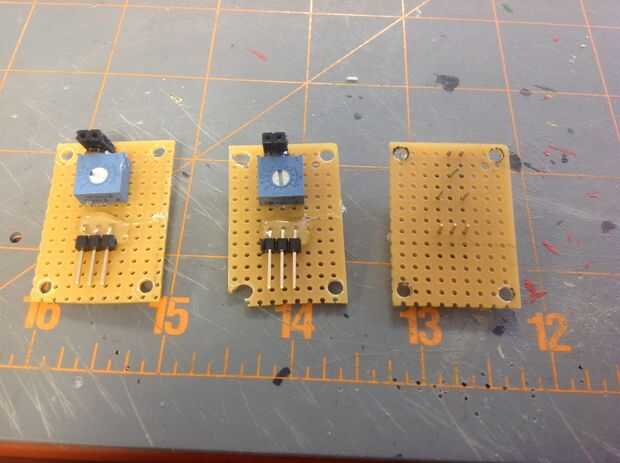

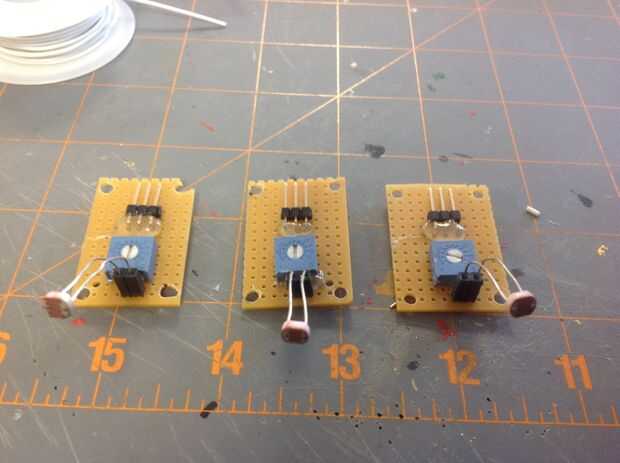
Ahora para la electrónica de los sensores de luz. Cada sensor de luz consiste en un divisor de voltaje de un fotoresistor y 250K de recortadora. En primer lugar, de la franja de cabecera femenino, corte tres pares de cabezales. De la franja de cabecera masculino, cortar tres tramos de tres cabezales. Véase el cuadro de acompañamiento. Doblar los encabezados de macho, si es necesario, para formar un ángulo recto. Antes de soldar nada, lo primero que hice fue pegamento caliente una rúbrica femenina par, uno tres pin header macho y un trimmer de 250K a cada mesa pequeños proto. Ver figura de acompañamiento. En la parte posterior de la protoboard habrá dos cables desde la cabecera de la mujer, tres plomos de la podadora y tres conduce de la cabecera del hombre como se ve en la extrema derecha en la figura adjunta. Antes de soldar, puede ayudar a doblar las puntas de la podadora como se muestra en la foto que lo acompaña. Soldar los cables como sigue. Una sección de cable (blanco en la fotografía) conectará el plomo del limpiador de la cortadora cables de extrema derecha de los encabezados de masculinos y femeninos. Una segunda sección de cable (rojo en la foto) conecta la izquierda Rúbrica femenina plomo a uno de los plomos de la podadora y el centro de la cabecera del hombre. Una tercera sección de cable (negro en la foto) Conecte el cable restante del recortador a la izquierda más plomo masculino del encabezado de la. Por último, inserte una fotorresistencia la cabecera femenina en cada tablero pequeño proto.
La ventaja de este divisor del voltaje es que se puede ajustar con un destornillador pequeño a través de la podadora. Así la sensibilidad del sensor de luz puede ser cambiada independientemente del código de Arduino (figura abajo). Además, estas pequeñas plataformas ahora pueden utilizarse como sensores de luz para los proyectos de futuro de la electrónica. Además, otros tipos de electrónica pueden ser puestos sobre las tablas de proto pequeña de 1,5 x 2,5 cm; LEDs, Zumbadores piezoeléctricos, botones, láser, etc.. Dado que todos los tableros pequeños será del mismo tamaño, serán intercambiables en la cubierta del robot, dando muchas posibilidades para las configuraciones de robots diferentes. Actualmente estoy construyendo varias tales placas y escudo Arduino modificado para requisitos particulares para un futuro Instructable.



![Línea de arduino motor escudo] siguiente robot (FC-51)](https://foto.askix.com/thumb/170x110/b/06/b06d7be12d3b25ef8f1cbac2cc667e38.jpg "Línea de arduino motor escudo] siguiente robot (FC-51)")









