Paso 3: Cableado + electrónica

La idea básica es:
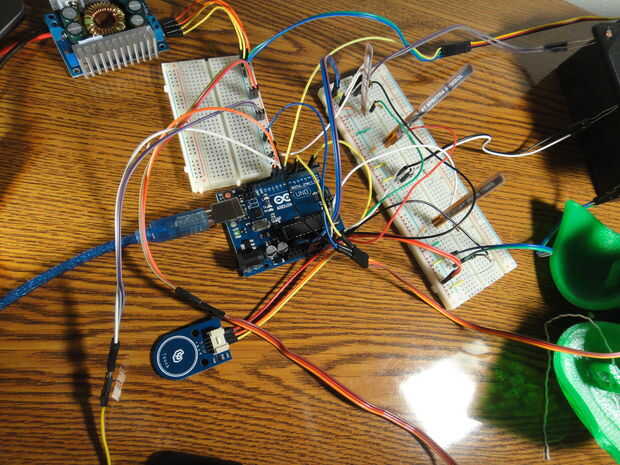
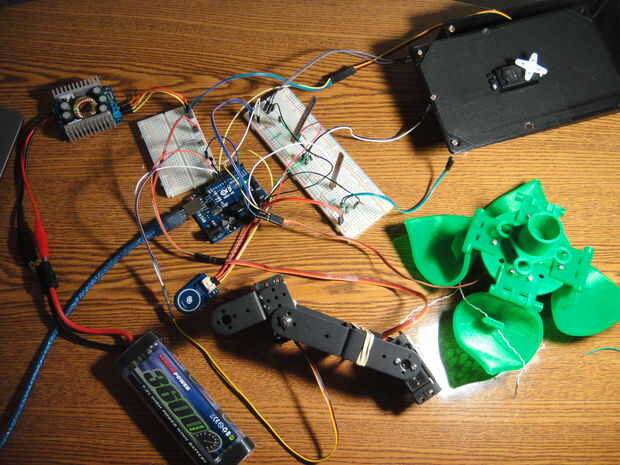
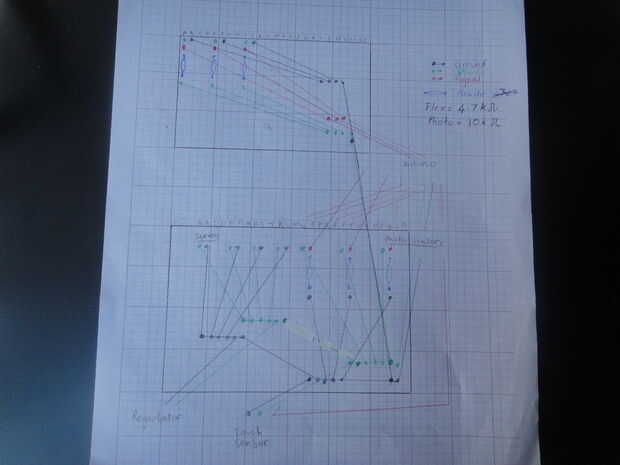
La gran batería externa entra en el paso por el regulador.
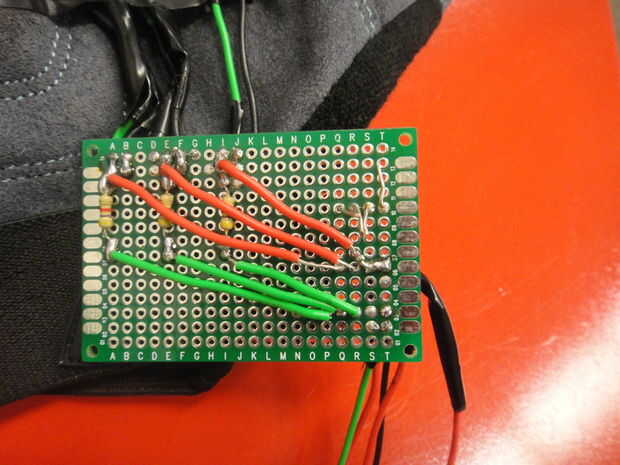
Entonces el regulador va a los carriles de la energía en el protoboard [que es el Cúmulo abierto buscando tablero del PWB que ves en foto 8].
Los servos están conectados a la tierra y el poder del riel de alimentación [suministrado por la tensión regulada].
Los cables de señal de los servos van a los pines digitales del arduino.
Entonces, el poder y la tierra para los sensores [fotorresistencia + todos los flex sensores] viene de la placa arduino.
El cable de señal para el teclado entra en uno de los pines digitales, mientras que los sensores de flexión se colocan en los pines analógicos [pero no antes de coloca una resistencia en serie--ver la diversión de la chispa enlace para más claridad].
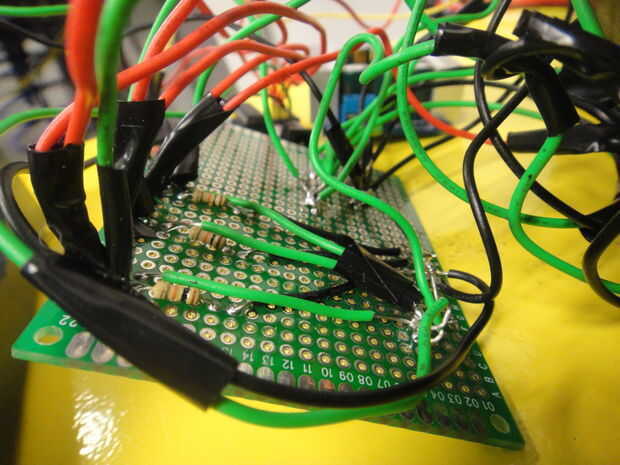
Una vez que las funciones de la protoboard, entonces compra algunas PCB [como este tipo ] y se establece.
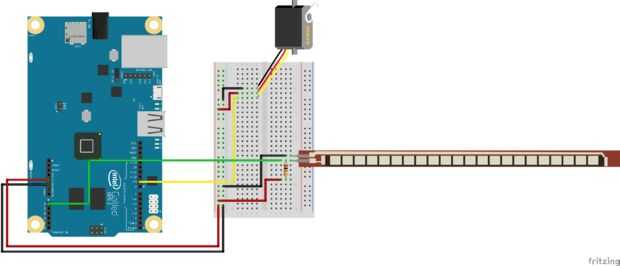
Aquí está un proyecto similar que hizo un buen trabajo en el que muestra el cableado de los foto resistores y servos:
Imagen de Fritzing + clarificante de cableado: https://learn.sparkfun.com/tutorials/sik-experimen...


")










