Paso 4: Los motores y las ruedas



Ahora debo señalar que Kyle y trabajo en R & D en
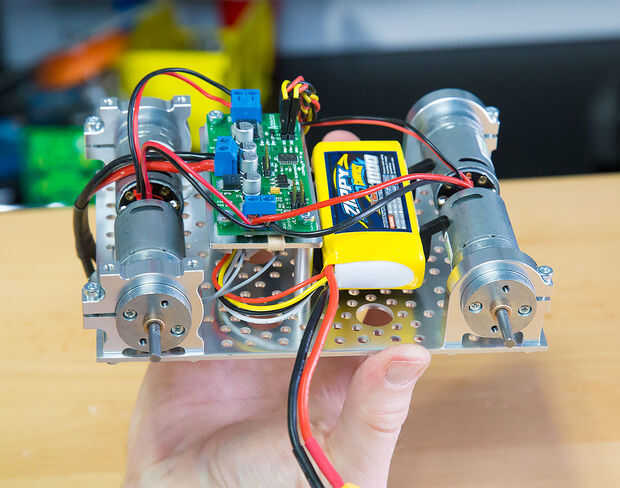
RobotZone® (RobotZone hace Actobotics piezas y es una matriz de ServoCity.com). Debido a esto, somos lo suficientemente afortunados para tener acceso a algunas partes del prototipo pre-lanzamiento. Esto es bueno porque realmente quería usar nuestros nuevos motores econ poco en este proyecto y los nuevos soportes del motor que van con ellos son sólo tímidos de ser liberado. Así utilizamos los soportes del motor previo al lanzamiento; por esta razón los soportes del motor delantero dos son diferentes de la parte posterior dos (ya que teníamos un número limitado de ellas). Normalmente se desea usar el mismo en los cuatro. Atamos el motor monta a la placa estampada, fijar nuestros motores en lugar, y el chasis estaba listo para rodar.
Ya que estábamos usando las ruedas que habían sido durante mucho tiempo en actividades de i+d, maltratados los neumáticos de goma de las ruedas con un cepillo de alambre, luego lavar apagado. Con el tiempo adquirieron un tipo casi viejo borrador de dureza suave que este proceso eliminado y les dio mucho más tracción. Atamos los ejes a las ruedas y utiliza 1/8" eje separadores en lugar de arandelas individuales en el exterior... que parte es opcional, sobre todo nos gustó cómo se veía.













