








Una escuela necesita ayuda con la construcción de un quad copter. Habían comprado las piezas por separado de Banggood a buen precio pero lamentablemente vinieron sin instrucciones.
Aquí está una lista de piezas (lo que puedo determinar el embalaje)
Transmisor: http://www.banggood.com/Hubsan-X4-H107C-RC-Quadcopter-Spare-Parts-Transmitter-Mode-2-H107-16-p-915638.html
Receptor: http://www.banggood.com/Upgraded-Hubsan-H107-X4-RC...
4 x motores: (como) http://www.banggood.com/2-X-8x20mm-Motor-For-Hubsan-X4-H107C-H107D-RC-Quadcopter-p-87683.html
4 x palas: http://www.banggood.com/Hubsan-H107-X4-RC-Quadcopter-Spare-Parts-Propeller-Blade-Set-p-72513.html
Cargador de batería: http://www.banggood.com/4-In-1-X4-Battery-Charger-For-Hubsan-X4-WLtoys-UDI-JXD-Syma-Quadcopter-p-933932.html
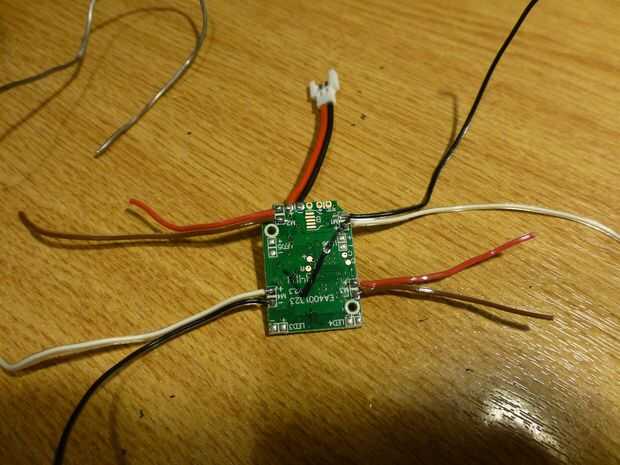
Había construido mi propio quad copter y sentía el reto. Después de googlear algunos de los números de parte del receptor, determinó que debían hacer un Hubsan H107 X helicóptero RC Quad 4. Usando este enlace útil, pude aprender las conexiones del motor.
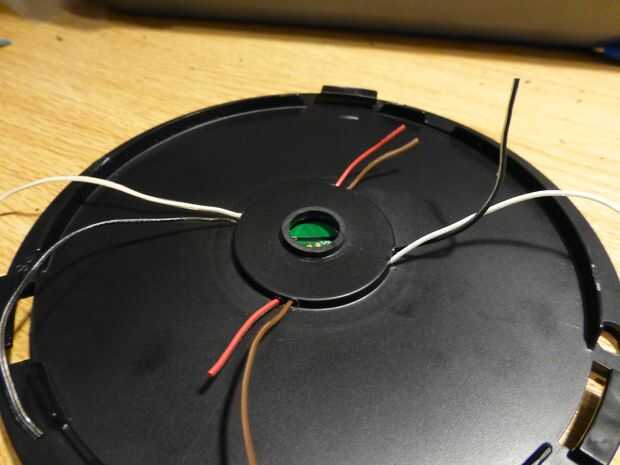
La siguiente tarea era encontrar o hacer algún tipo de base para los componentes. Decidí usar un viejo caso de CD-ROM, cortando el poste central. El pozo en el centro parecía ideal para el receptor. A continuación 4 agujeros perforados en el borde, sólo lo suficientemente grande como para un ajuste de interferencia con los motores.
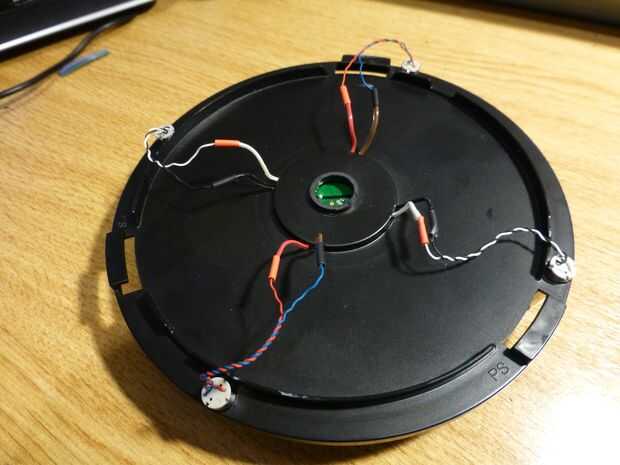
Los cables del motor no eran lo suficientemente largos para alcanzar el receptor por lo que he añadido algunas extensiones cortas. Yo mientras tanto, había sido cargar la batería motor poco, que tomó 30 minutos aproximadamente, utilizando el cargador USB incluido. El LED se enciende mientras que está cargando y se apaga cuando está completamente cargada. Me midió la tensión después de la carga y encontró que era 4,18 voltios.
A continuación, poner las hojas en los motores y estaba dispuesto a hacer algunas pruebas. Primero encendí el transmisor, y el LED se puso rojo. Luego conecté la batería al receptor y sus dos LEDs azules alternativamente brevemente flasheado me alojé, al mismo tiempo el LED de la transmitterl se volvió verde y había un pequeño pitido para decirme que estaban conectados.
Entonces levanté la palanca izquierda para aumentar la aceleración y los 4 motores comenzados a girar. Entonces me di cuenta de que las palas se mueven en la dirección equivocada, así que apagado y había cambiado las láminas sobre. El diseño correcto es el siguiente: 1 Motor debe ser hacia la izquierda, Motor 2 derecha, 3 Motor en sentido horario y antihorario Motor 4. Los motores son numeradas 1, 2, 4 y 3 al contado en sentido horario alrededor del receptor como visto desde arriba.
Después de haber intercambiado las hojas, intentaron otra vez. La nave apenas consiguió despegar un acelerador a fondo. En este punto decidí que el caso de CD-ROM era demasiado pesado y sobre todo prevenir el flujo de aire hasta en las hojas. Luego usé un cuchillo de sierra para metales y arte para eliminar la mayor parte de la caja excepto en forma de X.
Esto probó acertado, y era capaz de volar la nave, ver vídeo a continuación (MiniQuadCopter.wmv). Es muy vivaz y sensible y mis habilidades de vuelo dejan mucho que desear. El control remoto también probablemente necesitará ser ajustado usando los botones pequeños al lado de los joysticks. Algunas investigaciones es necesario para encontrar un material más ligero y más fácil manera de montar los motores y controlador de vuelo. Todo me pareció una tarea gratificante y espero que los estudiantes Obtén tanta diversión y satisfacción edificio propio.













