Paso 1: Ninguna idea lo que estoy haciendo
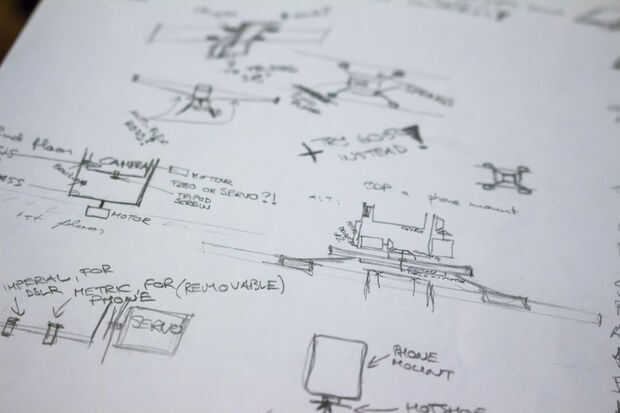

Mientras que yo tenía algunos bocetos para la plataforma y el plan para escribir código establecida pronto me quedó claro que no tengo ni idea de cómo llegar a ser amigos con esta nueva plataforma. Realmente me tomó varios días, más de 10 horas en total hasta que finalmente conseguí la placa conectada a la computadora y correr el centelleo del bosquejo con arduino. Mientras pude transferir alguna falta de el instalador todo-en-uno y el sistema operativo Windows, sobre todo el hecho fue PEBKAC, tan vergonzoso como sería admitir que. Instalar todo por separado y manual intermitente fue lo que funcionó para mí junto con este video viejo.
Puesto que los problemas nunca terminan esto fue sólo el primer número, la línea de tiempo del proyecto parecía algo como esto (de lo que puedo recordar):
- Agosto: Recibir el Consejo y los regalitos de Intel y de Instructables (yay, mucho entusiasmo y esperanza)
- Agosto: Recibe el escudo de la Base de Grove junto con algunos puentes, y luego pasar varios días intentando conectar a Edison a la PC, algo apagado con controladores, cliente de Arduino y todo eso. Sobre todo la PEBKAC.
- Septiembre: Todo conectado, probando interesantes módulos incluyendo los controladores de motor que no funcionan.
- Septiembre: Controladores del Motor todavía no funcionan, incluso en Arduino.
- Septiembre: Buenos colegas enganchar las tarjetas de conductor a un osciloscopio. Señales de vida, MCU en tableros, probablemente no vacíen.
- Septiembre: Bueno colega ayuda con cosas que destella en el conductor del motor. Ahora es reconocido por Arduino y Edison.
- Septiembre: yo Conecte un MPU6050 a la Junta porque parece que necesitaré para la conciencia de la posición.
- Septiembre-octubre: Cantidad inusual de trabajo cae sobre mi cabeza, Edison recoge polvo. Compró algunas piezas de hardware para la plataforma. Ampliación del plazo me da esperanza.
- 11 de octubre: Volver a las cosas. Pasar todo el día tratando de averiguar cómo obtener y filtrar los datos de la IMU. Sólo tuvo éxito en obtener valores y convertir a unidades SI. Deciden probar jugar con controladores de motor en su lugar por ahora.
- 11 de octubre: Controlador de Motor no da señales de vida en Edison o Arduino.
- 12 de octubre: Bueno colega sugiere que hacer clic en el botón de reset a bordo. Arduino ahora ve la tarjeta de conductor en I2C. Sentirse tonto significa que sólo aprendí algo.
- 12 de octubre: Decidir, que no hay necesidad de IMU en un sistema de rango de movimiento claramente definidos.
- 13 de octubre: Edison no ve a la Junta sobre I2C y cuelga en Wire.endTransmission durante el escaneo de I2C.
- 13 de octubre: Decidir que voy a tratar de usar python para el conductor del motor en su lugar. No tiene experiencia qué tan nunca de python, pero un Instructable por CarmelitoAndrade me guía rápida. ¡Gracias!
- 14 de octubre: Probar cosas con python. No se puede actualizar bibliotecas y am de lo contrario ni idea como se esperaba.
- 15 de octubre: Flash la imagen más reciente a Edison ya que no necesitará ejecutar script de arduino en el inicio y tratar de conseguir otra vez libmraa. Éxito esta vez.
- 16 de octubre: Dos clics de comprar otro conductor del motor, pero deciden la lista de bibliotecas de prueba una vez más. Allí vas, al parecer, para ejecutar el controlador de motor de Grove necesita la biblioteca grovemd, l298 una doble facepalm
- 16 de octubre: Logró ejecutar el conductor del motor de script de Arduino. Bueno, mejor ahora que nunca supongo.
- 16 de octubre: Trate de SSH en el tablero, algo mal otra vez, no se puede conectar en Wi-Fi y serie.
- 17 de octubre: Flash Edison para solucionar los problemas de conexión, no descargar libmraa y tienes que ir a trabajar.
- 18 de octubre: Llegan a actualizar libmraa, tratar la muestra de grovemd.py y obras, aprender algunos python en él. Tal logro. Muchas esperanzas!
- 18 de octubre: Los archivos para manual de diseño y corte las piezas de madera contrachapada del carro del laser.
- 21 de octubre: Cortar las piezas diseñadas
- 23 de octubre: Montar la mayoría de lo carro
- 24 de octubre: Aerosol de goma en las ruedas
- 26 de octubre: El caucho en que rocían falla en la entrega. ¡ Bienvenido a la goma!
- 7 de noviembre: Hecho algunos cambios de hardware en el carro y taladros para placas de circuito
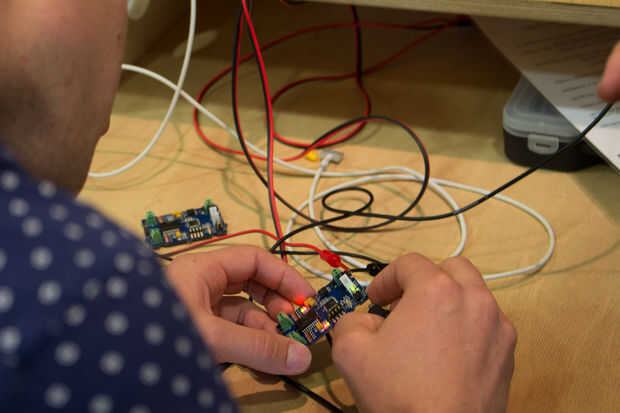
- 8 de noviembre: Logró encender un LED con un tweet, finalmente. Entonces los motores así.
- 9 de noviembre: Soldar algunos cables y poner todo junto para una prueba. Tomaron fotos y se apresuró a escribir este instructable.
Una cosa te puedo decir seguro - yo voy tomando CS50x de Harvard tan pronto como una nueva línea (año nuevo, más o menos). Toda esta frustración me hizo comprender lo despistado que soy en estas cosas y conseguirme en despiste más profundo sólo podría resolver eso. O no.
Lo que puedo decir a los desanimados por semejantemente menos explorados y más complicadas plataformas - sólo mantener va y cavar para encontrar respuestas y usted conseguirá donde usted quiere estar. Persistencia nunca falla.




")

 con una plataforma giratoria - no una cámara giratoria 3D!")






