
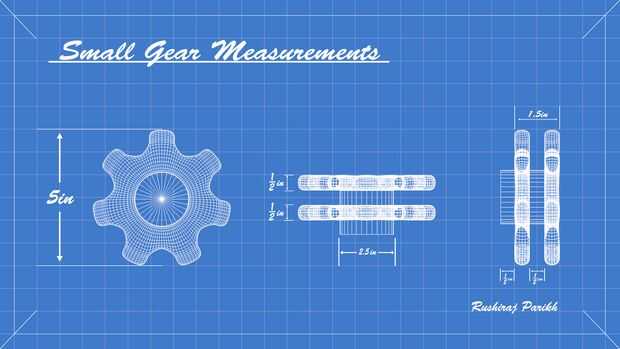
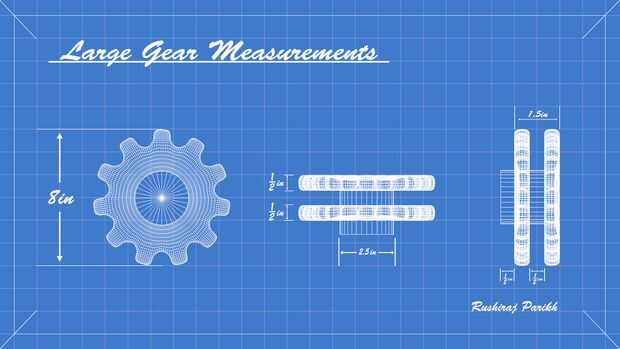
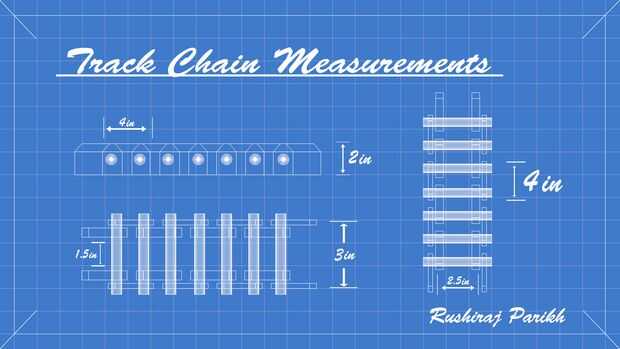
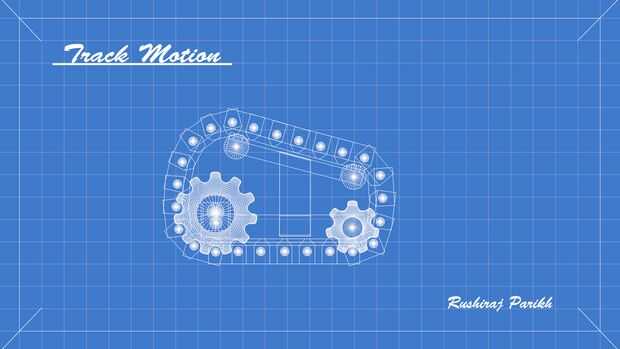
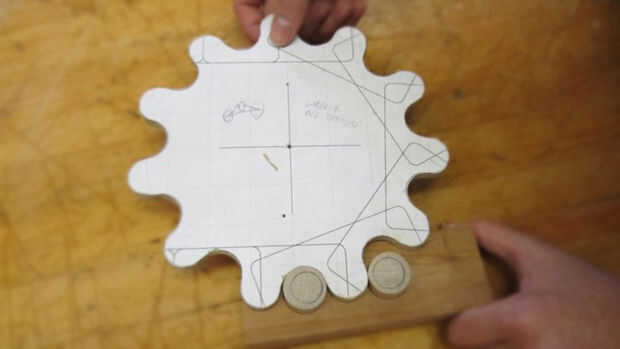
















1: todas las partes comenzadas con unos simples bocetos que fueron más tarde diseñados y dimensiones apropiadas en una animación generada por ordenador en un programa de código abierto llaman blender. Como puede ver en las fotos (blueprint), primero diseñé mallas 3d desde cero y renderizado en 2d para lograr el efecto plano. Después de crear las piezas, he creado una animación de cómo todas las piezas se unieron
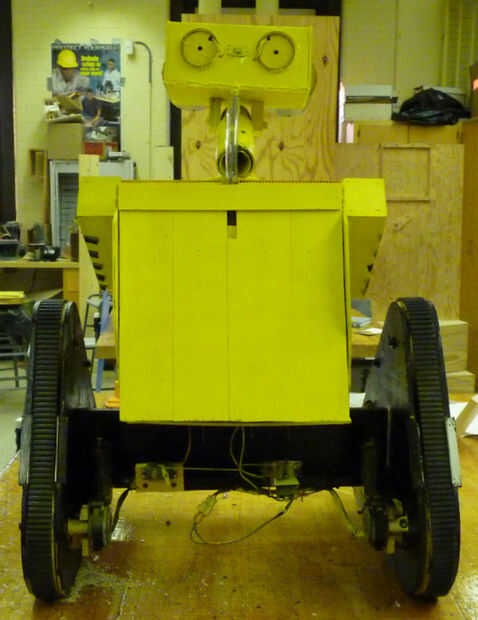
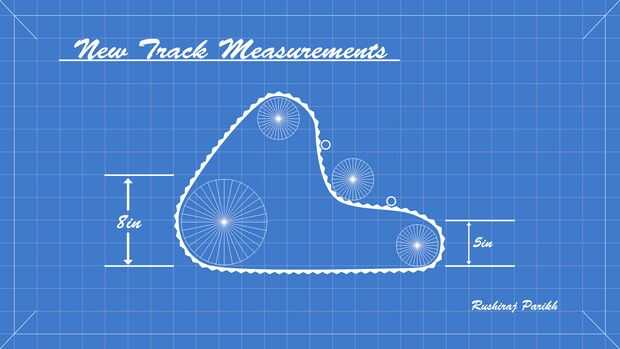
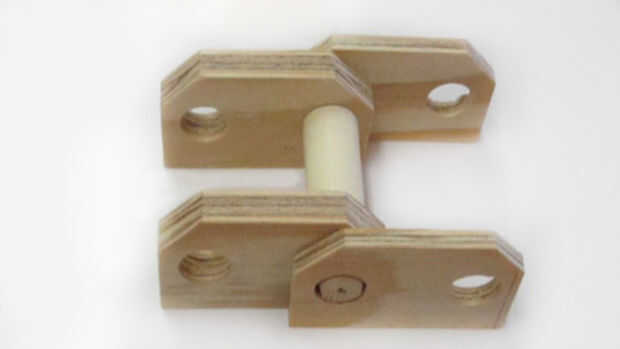
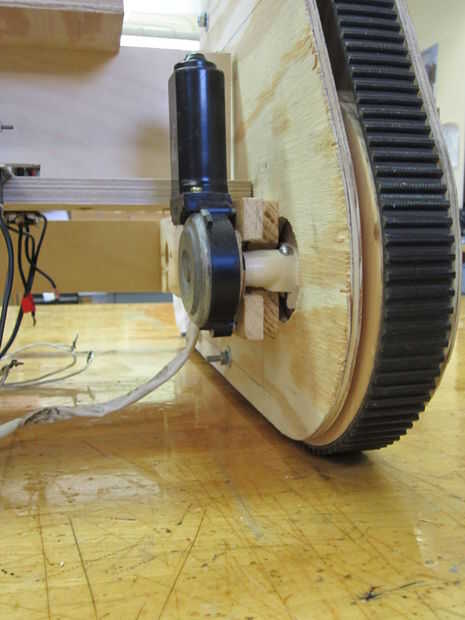
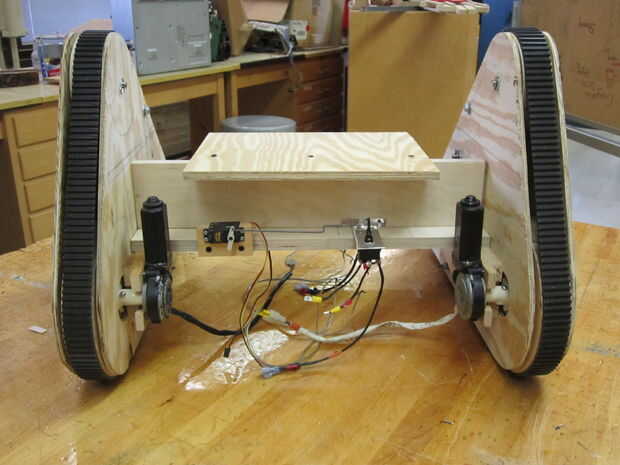
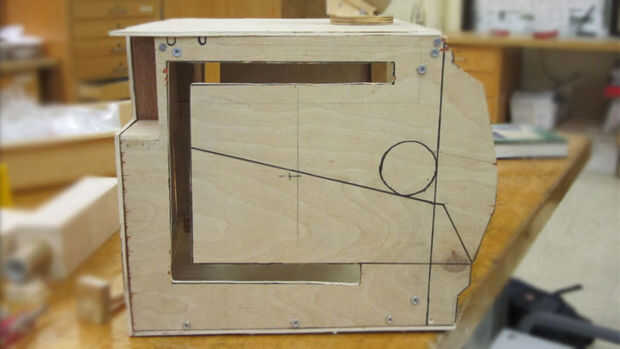
2: tratar con los problemas mecánicos fue el conjunto más grande detrás. Debido a la falta de apoyo, uno de los lados del viejo sistema de la pista se iba fuera de balance, así que he creado un nuevo tipo (mejor) del sistema.
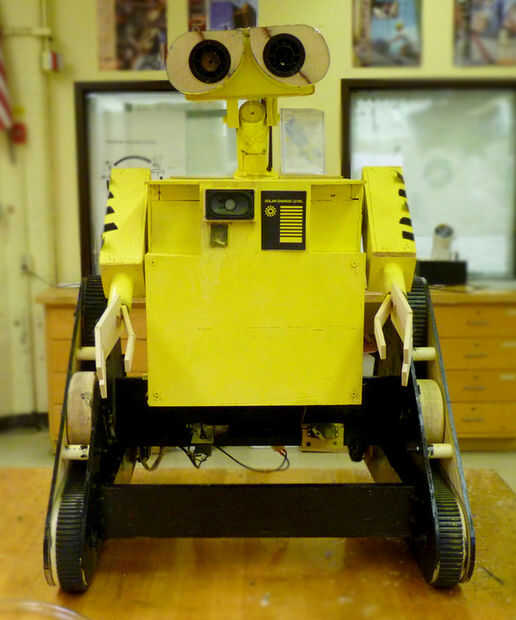
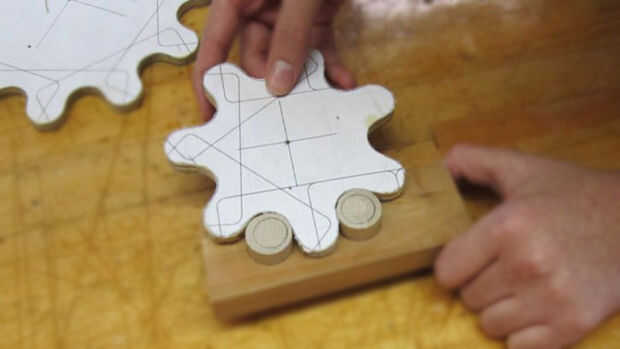
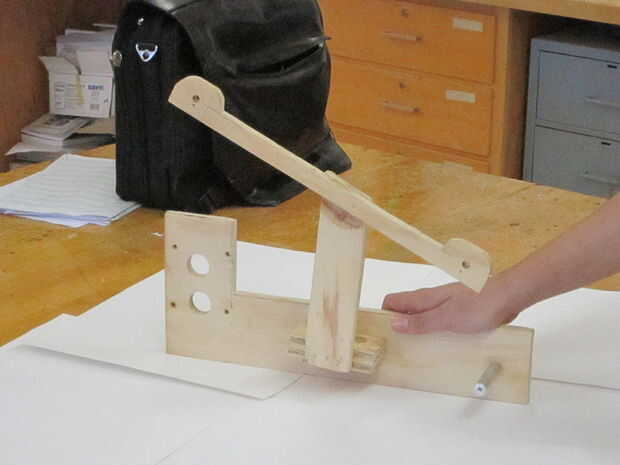
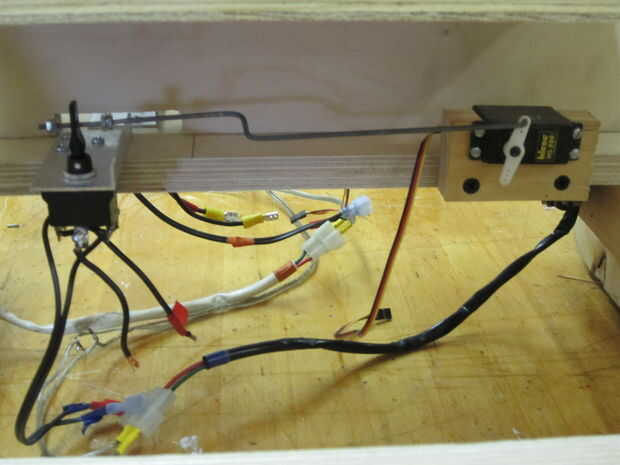
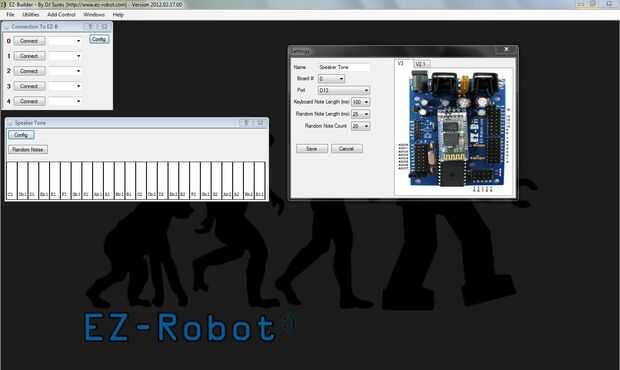
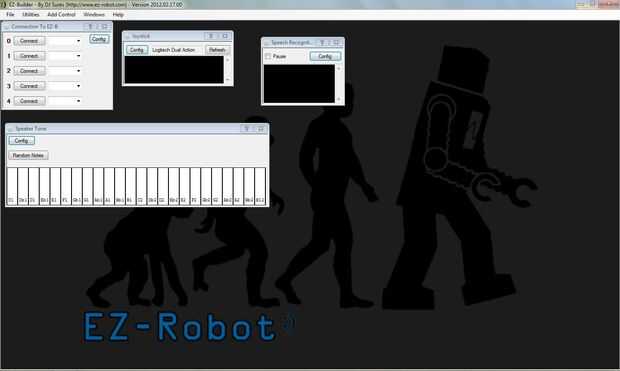
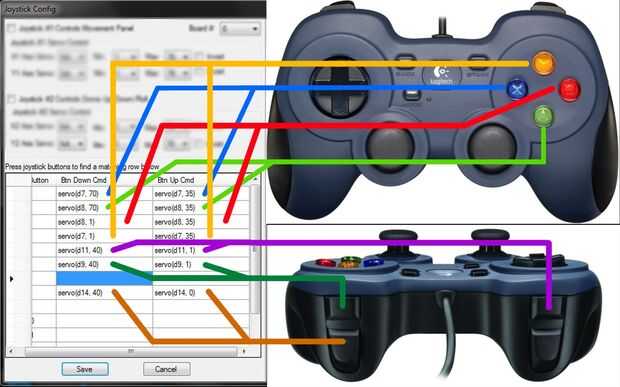
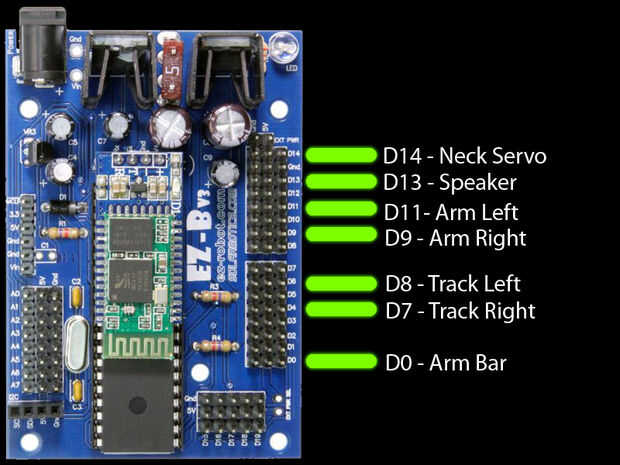
3: creación y montaje fue quizás la tarea más simple. Desde entonces tuve mis diseños listos, de todas partes vinieron juntos muy bien. Mi controlador llamado EZ-robot bluetooth controller, ayudando grandemente en la programación de las piezas. Al final, pude controlar inalámbricamente los servos y sensores con un joystick conectado a mi portátil. (sensores incluyen interruptores, LEDs y un altavoz) (mover servos actuó como un interruptor para accionar el movimiento y la dirección de la pista)
p.s. Si desea ver mis archivos de modelo, aquí hay un enlace para descargarlos--- Files.rar mezcla de Wall-E
PPS también es un sitio web que he creado (desde cero) que da más información sobre este proyecto--- Proyecto WALL-E
Si te gusta mi hilo, por favor votar para mí en el 3D Concurso---
(grandes puntajes siempre son apreciados)









")



")