Paso 8: Simulación con ejes controlados independientemente del actuador
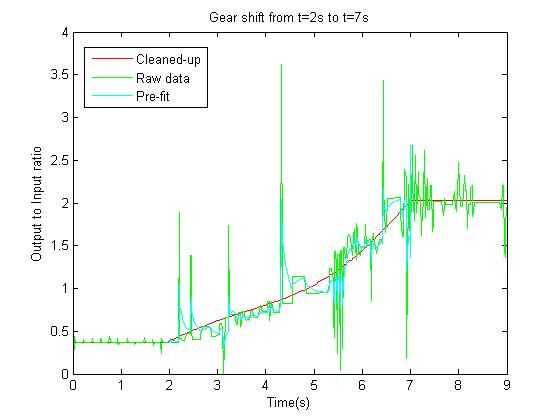
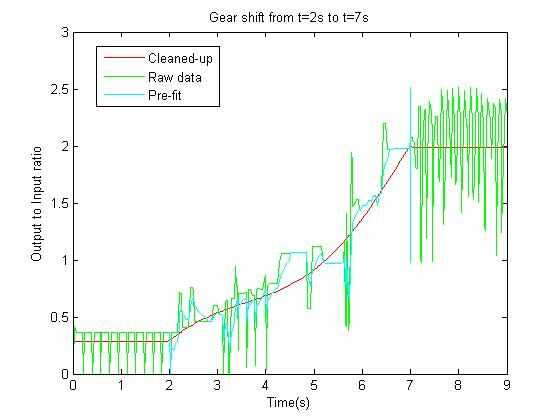
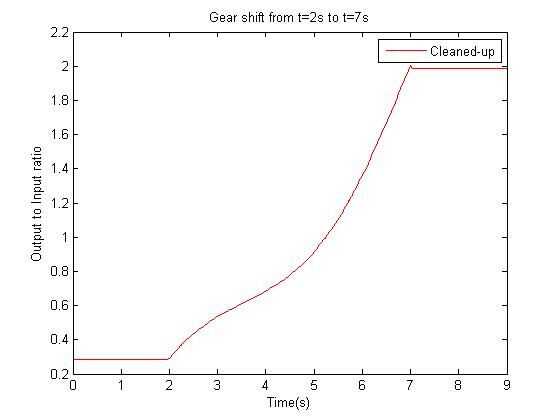
Como se mencionó en el paso/página anterior, la tasa de cambio de engranaje no es lineal. Y usted puede notar los dientes pueden perder el contacto (la malla? alguien me puede decir el término correcto). Para superar esto, debemos controlar de forma independiente cada uno.
Nota * creo que no es la mejor manera de hacer esto pero es el único método podría pensar de
1) Similar al método vinculado eje cubierto en el anterior paso de las páginas, abra el add-in y definir los contactos.
2) esta vez quieres "adhiera" el motor lineal para los dientes y asegúrese de que la placa y el eje no giren (fijar la placa o definir una pareja paralela para los dientes y una cara fija). Siguiente quieres registrar los datos de la velocidad lineal para el cubo y guardar. Hacer esto para apertura y cierre de los dientes difundir ya que ambos son diferentes.
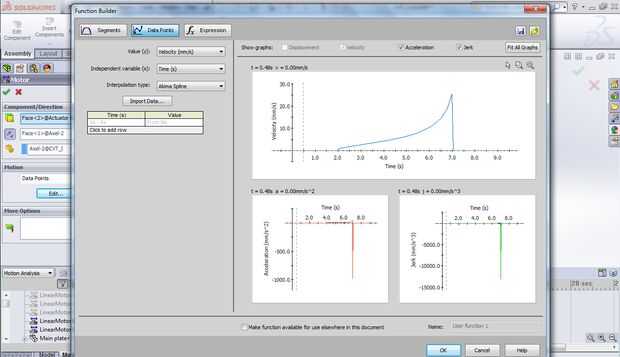
3) ahora configurar motores lineares para los centros como en el anterior paso de las páginas. Pero esta vez asegúrate de que la velocidad no es constante y sigue los datos que recabó anteriormente. Se debe ejecutar sin girar el árbol de impulsión primero para probarlo.
4) una vez que son capaces de mover la propagación de los dientes como se pretendía, añadir en un motor en el eje y lo hiciste!
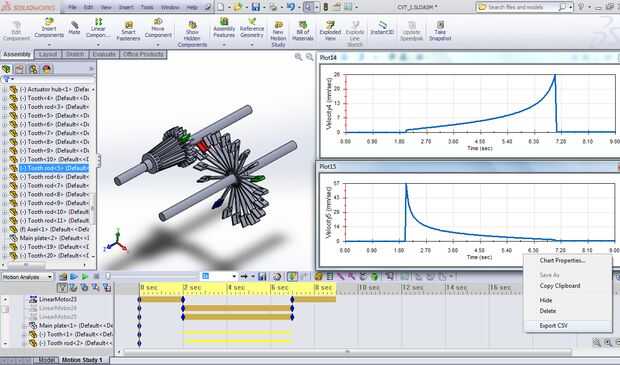
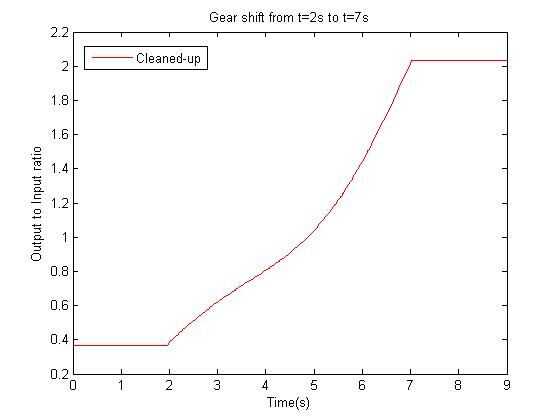
5) Similar a la del paso anterior/pagina, parcela y guardar los datos luego ejecutarlo a través de algún proceso (puede utilizar el mismo archivo .m)












 speedweaving")
