![]()
![]()
![]()
![]()
![]()
![]()
![]()
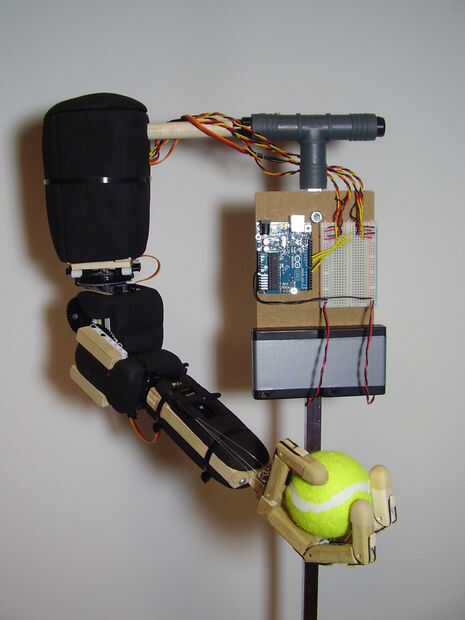
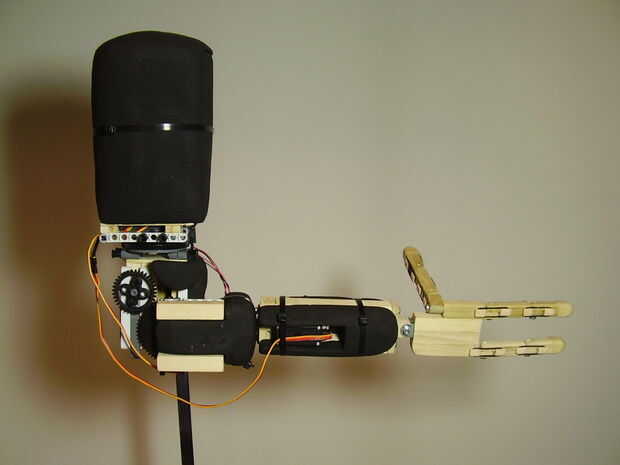
este es mi primer prototipo de un manipulador robótico. Hasta ahora, he realmente centrado en el aspecto físico del brazo por lo que no he estado trabajando mucho en el aspecto del programa. El objetivo actual de este proyecto es crear una plataforma sólida para reproducir cada día acciones y desarrollar mis aptitudes de programación. El brazo tiene 4 grados de libertad: rotación de bíceps, codo, muñeca y pinza. Todavía no he trabajado en el hombro, pero llegará un día! Es muy básico pero estoy sorprendido de lo que puede lograr por el tiempo que he pasado en este proyecto! Por cierto, este es mi primer instructivo! Disfrutar :D
Enlace a una demostración de una secuencia básica:
http://www.youtube.com/watch?v=w2E5lZS_AvI
Gracias por su interés!









")



")



")
