Paso 18: Base - 10
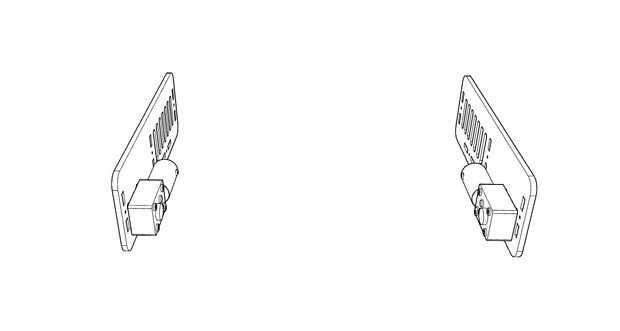
Ahora, preparamos las placas laterales de la base del robot. Pegue un grande, altamente orientado a 12 voltios DC motorreductor sobre dos de las placas, una para el lado izquierdo y uno para el lado derecho. Soldadura de conectores XT60 hembra en cada uno de los motorreductores, con atención a la polaridad. Cuando se sueldan los conectores XT60, sujete cada motor para su respectiva placa con 4 tornillos y 4 arandelas.
")





")



")


