Paso 22: Base - 14
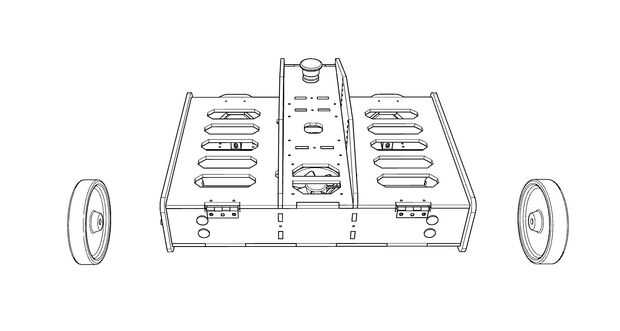
Por último, coloque las ruedas en los ejes de los motorreductores, uno para el lado izquierdo y otro para el derecho. Las ruedas deben tener un eje de sujeción o un centro de tornillo fijadas a ellos, que se utilizan para apretar la conexión con el eje del motor. Ahora ha finalizado con éxito el montaje de la base.
Observe que la base tiene 3 ruedas con contacto al suelo, los dos primeros de los cuales son conducidos por motorreductores y la tercera que es una rueda de giro libre. En robótica, esta disposición particular se conoce como una impulsión diferenciada, permitiendo al robot a avanzar, retroceder, rotar a la izquierda y girar a la derecha.
")





")



")


