Paso 44: El brazo--21
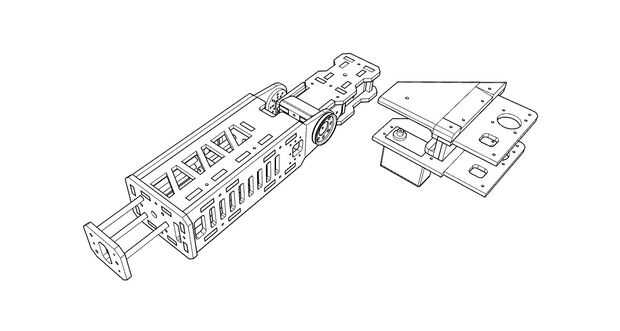
Acabado el brazo por el antebrazo/codo de paso brazo--20 la combinación con la articulación del hombro del brazo--3de paso. Como el paso anterior, un lado de la conexión es apoyado por un servomotor grande y su apego a un cuerno del servo circular. Apoyo al otro lado de la conexión con un tornillo grande y lavadora y un brazo será completa. Repita los pasos del brazo--0 a brazo--21 para construir el otro brazo
Como una nota interesante, este brazo es muy singular en el espacio de los diseños de brazo robótico. A diferencia de muchas otras armas, no hay rotatoria en medio del antebrazo, y en su lugar hay una articulación prismática. En total, hay 3 o más articulaciones por brazo; uno para hombro (gira a izquierda y derecha), uno para el codo (gira hacia arriba y hacia abajo) y uno que se extiende. Esto evita complicado cinemática inversa para brazos robóticos más y es muy fácil calcular los ángulos necesarios para posicionar el efector final del robot. Simplemente apuntar el codo y el hombro hacia la posición deseada y extender la articulación prismática hasta alcanzar la posición de destino.
")





")



")


