Paso 45: Pecho--0
Ahora para la tercera parte principal del robot: el pecho.
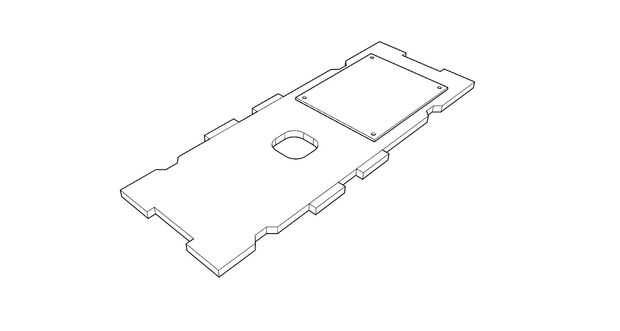
Comenzar a armar el pecho colocando un perfboard con todas las conexiones para actuadores y sensores en la primera pieza del pecho del robot. Fije el perfboard con 4 tornillos, 4 tuercas y 4 discos. Para obtener más información sobre cómo preparar el perfboard, consulte paso 60: cableado.
")





")



")


