Paso 56: Juntándolo todo--0
Ahora que todos los componentes principales del robot, la base, los brazos y el pecho se han completado, el siguiente paso es ponerlo todo junto. En primer lugar, combinamos la base con el pecho como sigue:
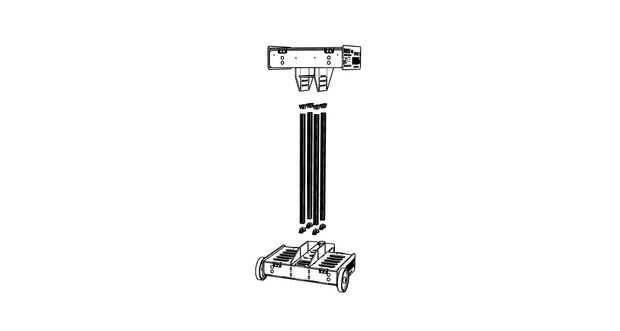
Conexión de la base:
Attachfour extrusiones de aluminio de 2 pies a la base del robot con soportes de ángulo recto de aluminio 8, 2 soportes para cada protuberancia de aluminio. Tornillo de cada uno de los soportes de ángulo recto 8 sobre su respectivos aluminio de extrusión con una tuerca deslizante, una tuerca para cada soporte en ángulo recto. Ahora, con los apoyos de ángulo recto conectados a las extrusiones de aluminio, tornillo de extrusiones de aluminio en la base del robot a través de cada uno de los soportes de ángulo recto 8. Además, atornille las placas de medio lado de montaje de la base del robot a cada uno de las cuatro extrusiones de aluminio con una tuerca deslizante, para un total de 4 tornillos y 4 tuercas de corredera.
Conectar el pecho:
Una manera muy similar a la base del robot, damos las cuatro protuberancias de aluminio al pecho del robot. Primero conecte 8 es compatible con más ángulo recto de aluminio a la parte superior de las extrusiones de aluminio, 2 soportes para cada protuberancia. Tornillo de cada uno de los soportes de ángulo recto 8 sobre su respectivos aluminio de extrusión con una tuerca deslizante, una tuerca para cada soporte en ángulo recto. Ahora que la parte superior de las extrusiones de aluminio colocados los soportes de ángulo recto, cada tornillo de los soportes de ángulo recto de aluminio sobre la placa inferior del pecho del robot, para un total de 8 conexiones. Para soporte adicional, coloque las tuercas correderas más 4 en los lados de mediados del pecho del robot, uno para cada protuberancia de aluminio y fije las placas de medio lado en las extrusiones de aluminio con 1 tornillo por deslizamiento de la tuerca.
")





")



")


