Paso 60: cableado

El móvil multiusos manipulador Mk 1 tiene un montón de actuadores y sensores que necesitan ser controlados simultáneamente por un solo Arduino Mega. Aquí está una lista de los componentes que necesita para ir en el perfboard principal para todos ellos:
- 4 x bornes de tornillo (12V, 6V, 12V -> 6V, 5V)
- cabecera de 2 x 4 pin para telémetro ultrasónico (5V, TRIG, ECHO, GND)
- Jefe del pin de 1 x 5 de doble controlador de Motor DC (DIR1, PWM1, DIR2, PWM2, GND)
- par de 2 x 8 pin header para controlador de Motor paso a paso (paso, DIR, RESET, 12V, GND, 5V, GND)
- 2 x 10 k ohmios resistencia de paso a paso de carrera
- Jefe del perno 2 x 2 para paso a paso de carrera
- 2 x 100UF condensador para Motor paso a paso
- 1 x 10 k ohmios resistencia de Transistor
- 1 x Transistor para el torneado de los ventiladores y
- Jefe del pin de 3 x 2 para el ventilador de la computadora de 80 mm (12V, GND)
- cabeceras de 14 x 3 perno para Hobby Servo motores (SIG, 6V, GND)
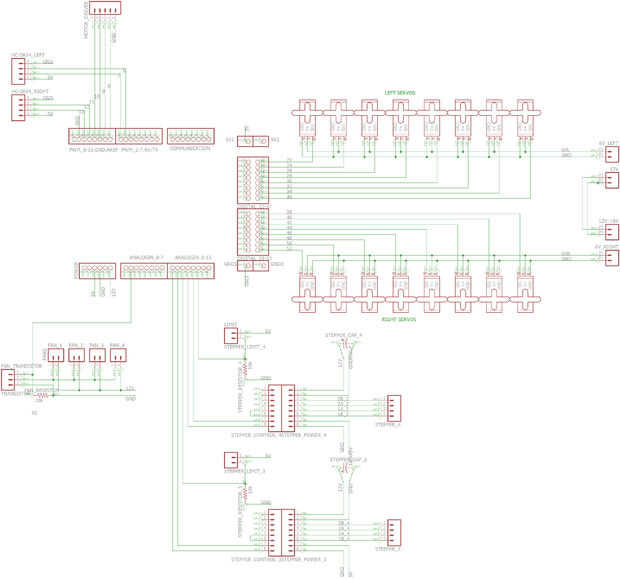
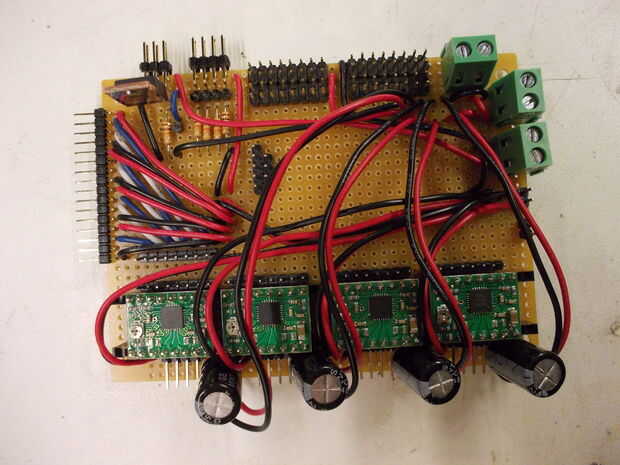
Organizar estos componentes en un perfboard grande y alambre de la soldadura/les según el esquema previsto. Un arreglo del ejemplo de los componentes se muestra en la imagen de referencia anterior. Tenga en cuenta que existen 3 principales tensiones que se están ejecutando en el robot: 5 voltios para los sensores e interruptores de límite, 6 voltios para los motores de servo hobby y 12 voltios para los ventiladores, motores y motorreductores DC. (Si lo prefiere, también es posible crear el diseño de la electrónica en un protoboard tamaño estándar primero antes de intentar crear el perfboard permanente.)
Cuando termine de soldar todos los componentes electrónicos en el tablero de control, conecte las clavijas de encabezado en el perfboard a los diferentes sensores y actuadores en el robot. Además, conectarse todos los pines de control necesario de la perfboard Arduino Mega como se muestra en el esquema. Una imagen es proporcionada para la referencia en el cableado como se verá cuando terminó.
Nota: Al conectar los cables a la Arduino Mega, se recomienda utilizar sólo una de las filas detrás de la Arduino Mega 2560, no ambos. El Arduino Mega tiene un efecto particularmente desagradable de pin-purga con las dos filas atrás: ajuste de un perno alto tiene una muy alta probabilidad de establecer su pin adyacente en alto así.
")





")



")


