Paso 66: Python Library
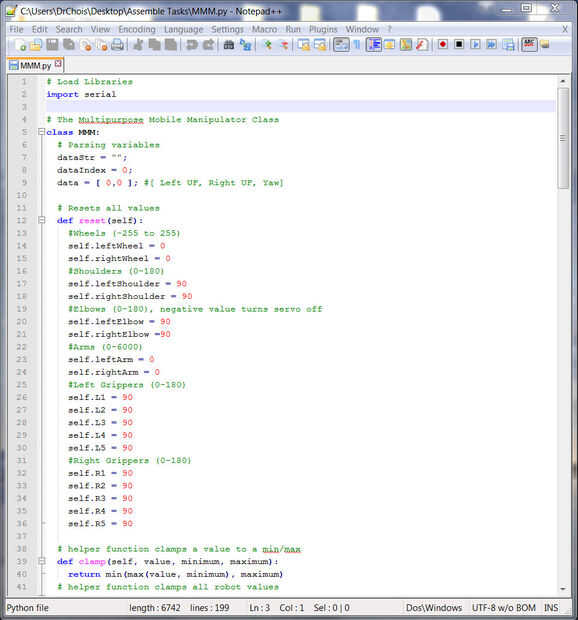
Después de completar el paso anterior, estará preparado para empezar a utilizar la biblioteca manipulador móvil multipropósito prevista para comenzar el desarrollo de aplicaciones con Python 2.7. El script principal que controla actuadores y sensores del robot se llama MMM.py. Aquí está una descripción de cómo funciona:
Comandos de comunicación serial:
- MMM(portName) abre un nuevo canal serial en portname de Arduino Mega 2560 del robot. Dar el Arduino aproximadamente 5 segundos para inicializar después de la conexión antes de enviar cualquier otro mando.
- parseData() obtiene las lecturas del sensor en el robot por el puerto serie de la lectura y análisis de la entrada.
- Update() envía todas las posiciones de actuador a Arduino por escrito al puerto serial, actualizar el robot real. Tenga en cuenta que el robot no se mueve ninguna de sus actuadores hasta que se llama a update()!
Comandos de lectura de Sensor y actuador posición:
- RESET() devuelve todas las posiciones de actuador a sus valores por defecto.
- setWheelVelocity (leftSpeed, rightSpeed) controla las ruedas. Las unidades están en metros, y valores positivos avanzar las ruedas mientras que valores negativos envía las ruedas hacia atrás. El rango de entrada es de + 18 m/s a - 18 m/s.
- rotateShoulders (leftAngle, perpendiculares) gira los hombros. El rango de entrada es de 0 a 120 grados, donde 120 grados gira los hombros completamente hacia el interior.
- rotateElbows (leftAngle, perpendiculares) gira los codos. La gama de entrada es de -60 a 60 grados, donde 60 grados gira los codos completamente hacia arriba.
- extendArms (leftAmount, rightAmount) extiende los brazos en metros. La gama de entrada es de 0 metros a.127 metros (aproximadamente 5 pulgadas).
- setLeftGrippers (l1, l2, l3, l4, l5) gira hasta 5 servomotores en la garra izquierda. La gama de entrada para cada servo es de 0 a 180 grados.
- setRightGrippers (r1, r2, r3, r4, r5) gira hasta 5 servomotores en la garra derecha. La gama de entrada para cada servo es de 0 a 180 grados.
- getLeftRange() y getRightRange() volver a las lecturas de izquierda y derecha telémetro a distancia, de 0 a 100 cm. lecturas fuera de los límites que devuelven -1.
Aquí es un script de ejemplo muy básico de cómo se usan estos comandos para mover el robot en Python 2.7:
")





")



")


