Paso 10: Calcular el circuito final
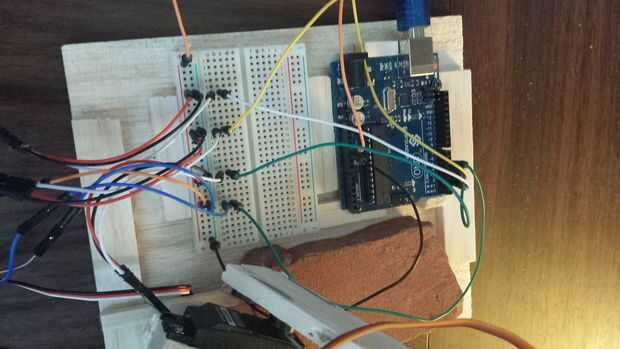
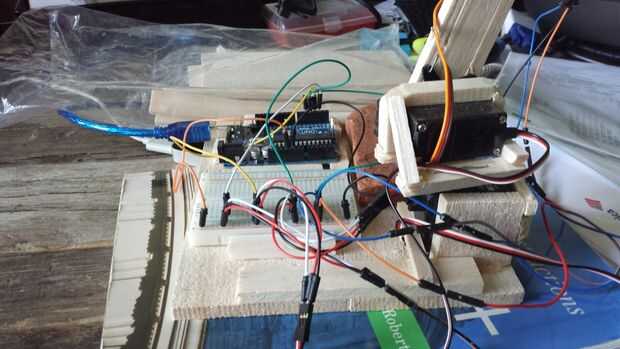
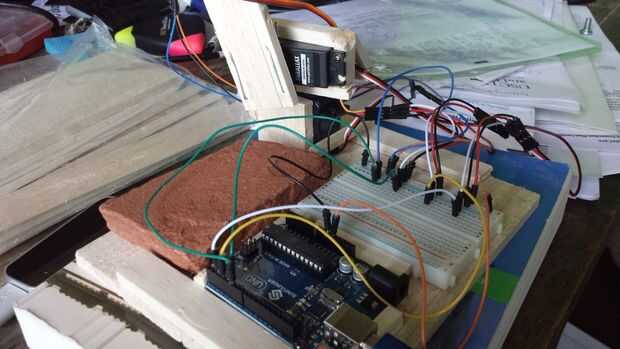
El circuito final se ve un poco complicado pero realmente no. Sólo tenemos un total de 6 pines conectado a nuestro dispositivo arduino cuando usamos el protoboard. Tendrás 4 pines digitales (2,3,4,5) ocupados y luego un poder y una de tierra. En la placa verás 4 filas principales de cables, cada fila corresponde a un único servo. La potencia de cada motor servo se une a la columna de alimentación en la placa que está conectada a 5V hacia fuera en el arduino. Recuerde poner la placa cerca del brazo por lo que los cables conectados al servo son lo suficientemente largos para alcanzar. Confío en ti chicos para alambre de 4 servos, no ciencia del cohete: p
Antes de utilizar el movimiento de salto para el control de cuatro servos todos necesitamos subir un dibujo nuevo sobre nuestro dispositivo Arduino que nos hará. En este momento nuestro bosquejo actual puede apoyar solamente un motor. Revisa el dibujo a continuación, si usted no está planeando sobre el uso de pernos 2,3,4,5 a sus servomotores de control deberá cambiar líneas 30,31,32,33.












")
