Paso 4: Configuración de bosquejo de Pyduino
En orden para poder controlar dinámicamente nuestro dispositivo Arduino que necesitamos subir un bosquejo de lo que pueden interpretar los mensajes lo enviamos desde nuestro código Python. La puesta en marcha de este bosquejo es bastante sencillo. El dispositivo Arduino se comunicará con nuestro ordenador por el puerto serie. Para más información sobre funciones Serial para Arduino: http://www.arduino.cc/en/Reference/Serial . El dispositivo Arduino comprobará para ver si tiene caracteres disponibles en el búfer de recepción serial y si lo hace va a analizar el mensaje entrante. Tras recibir que el mensaje completo del dispositivo luego interpretará qué hacer ya sea una función leer, escriba función o establecer un modo de pin. Este sketch es lo suficientemente versátil como para ser capaces de establecer modos de pin, realizar lectura y escritura digital y analógico los valores, así como realizar servo escribe. Cualquier función adicional tendrá que ser codificado en uno mismo pero para los propósitos de este proyecto no necesitamos agregar nada.
Compruebe hacia fuera el pedazo de código a continuación. Esto es lo que vamos a utilizar para obtener un motor servo con el controlador de movimiento de salto. Queremos ser capaces de conseguir un servo trabajando antes de seguir adelante y conseguir los 4 allí. Este archivo también está disponible en la página de github para este instructivo en: https://github.com/theown1/pyduino_leapmotion/blob...
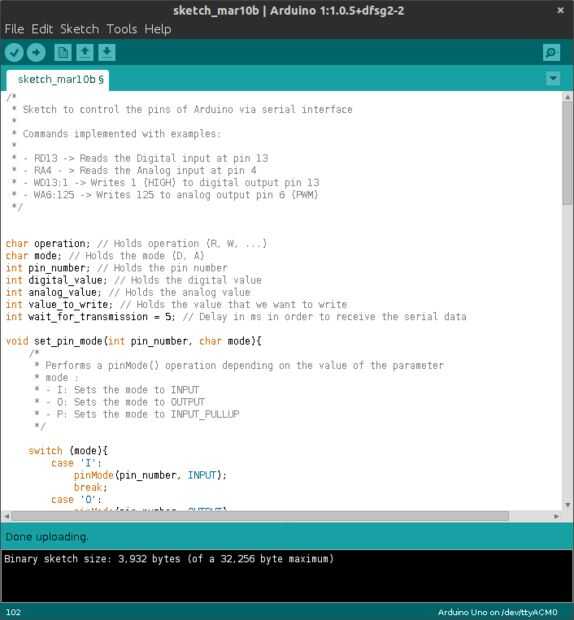
Puede seguir adelante y subir este bosquejo al dispositivo Arduino. Al subirlo, debe obtener una imagen que parece similar a la arriba. Una cosa que necesites anotar es la ubicación de su dispositivo Arduino en su computadora, usted puede encontrar esto en la parte inferior derecha del programa arduino después de subir un dibujo. Para mí mi arduino se encuentra en: / dev/ttyACM0












")
