



Por ello, un robot se mueve como un robot - o como alguien haciendo el el baile del robot: http://www.youtube.com/watch?v=4YJ3BTKMILw
Pero mientras que un humano puede imitar a un robot, un robot no puede imitar a un humano, ¿por qué? porque esos motores de precisión deben siempre ponerse en marcha, siempre comprometido y siempre en total y absoluto control de los exactos movimientos del robot, y en fin, no se relaja.
Esto no suena como gran cosa.
Pero cuando se combinan con un cuerpo ultra rígido te hace la vida muy difícil de hecho si eres un robot tratando de limpiar un hogar. Cualquier error de juicio y de ese brazo ultra rígido va a poner Super-precisamente a través de esa mesa de vidrio.
Sólo un bache en la alfombra es suficiente para hacer el robot unos grados donde se calcula que fue y adiós de cristal. Este problema es fundamental para el enfoque de robot de fábrica porque acelerar los tiempos de reacción suficiente para evitar el accidente también aumenta el daño potencial que puede ser causado y desacelerando lo suficiente como para nunca cometer errores hace el robot inútiles.
Robots de fábrica se basan en el ambiente estrechamente controlado de la fábrica para funcionar a velocidad - barreras de seguridad y todo. Llevar y son sólo trozos de metal destruyendo el mobiliario.
Imagínate correr más allá de la mesa de cristal y recoger el mismo vaso de jugo. Puede hacerlo porque su cuerpo es elástico y relajando los bits derecha mano fácilmente puede hacerse a nivelado a lo largo de la superficie de la mesa sin dañarlo.
Esta sencilla diferencia hace toda la diferencia.
No tienes que saber exactamente dónde está la mesa, su dedo meñique encontrarla y guiar su brazo a lo largo de él tan rápido como quieras porque los músculos de su brazo hacia atrás y los hombros se pueden estirar para dar cabida a errores.
¿Es simple derecho? ¿sólo tiene que añadir elasticidad a un robot de fábrica ultra rígida y seguramente podría hacer lo mismo? Bien no, porque entonces ya no es muy rígida, y que significa sus precisión motores ya no saben donde se ha trasladado al robot.
Para comenzar a añadir muelles y posición extra sensores y sensores de fuerza y sensores de aceleración y pronto se de nada como un robot que entiende o ha visto alguna vez antes. De hecho, parece mucho más como un sistema biológico - y afortunadamente hay un montón de ejemplos de sistemas biológicos humanoides para estudiar - nos de trabajo.
Un día quizás podamos diseñar mejor, pero por ahora todavía estamos luchando para entender sólo por qué el cuerpo humano es juntar lo que es y cómo esto da lugar a las increíbles hazañas que son capaces de: http://www.youtube.com/watch?v=Vo0Cazxj_yc
Lo que presentamos aquí y en el siguiente instructables es nuestro método para intentar resolver este enigma mediante la construcción de una sucesión de androides con los cuerpos de esa función, tan cerca como podemos gestionar, por los mismos principios mecánicos como el nuestro.
El objetivo es producir copias dirigidos de la anatomía interna de la mecánica y los materiales del cuerpo. Todo, desde funcionamiento copias de las superficies de baja fricción de las articulaciones a las pautas de los músculos con tendones motorizado conectado elásticamente en los mismo lugares y la manera como los músculos reales.
¿Esto todo suena bien y bueno pero seguramente está muy caro? Bueno, sí y no.
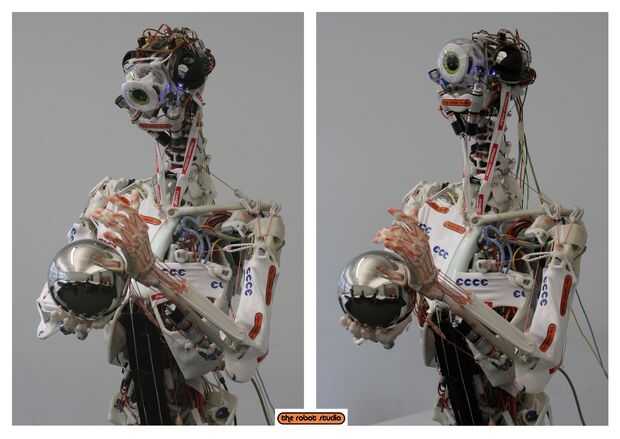
Sin duda ha sido costoso desarrollo de cómo hacer esto y hemos sido bastante afortunados como para tener un par de ayudas en el camino, pero extrañamente los robots fotografiados abajo totalmente fueron construidos a mano de componentes relativamente baratos con herramientas de mano simple - destornillador rescatado motores, controladores de velocidad para R/C coches y tarjetas de microprocesador de homebrew.
Costo total: < $ 3000/Eur
(Aproximado: 46 destornillador motores x 15 $/ Eur 46 potenciómetros x 10 $/ euros, 46 velocidad controladores x 27 $/ euros, microprocesador 6 placas x 30 $/ Eur 5 kilos Shapelock (polimorfo) 100 $/ euros, Dyneema, webcam, altavoces y otros materiales < 300 $/ Eur,)
3k de bits para un torso humanoide robot de tamaño completo, funcionando con potencia de 46 grados de libertad, del ordenador portátil no incluido...
Mientras que es la alimentación de pollo junto a 400k para un PR2 es dinero de bolsillo aún más que la mayoría de las personas, pero no temáis, por debajo de cien puede todavía hacerse un muy respetable par de manos.
Por lo tanto, vamos a empezar.
El ingrediente más importante es Shapelock (polimorfo en Europa) que se utiliza para unir todo lo demás y usted puede conseguir una muestra casi gratis (P & P) a jugar aquí:
Shapelock muestra: http://shapelock.com/page3.html
Para realmente sacar el máximo provecho aunque vas a necesitar unas cuantas cosas más... sólo esta lista es suficiente para hacer un par de manos de trabajo completamente.
Materiales:
Shapelock (polimorfo) - lo blanco estándar, un dedo usa 10 a 15 g
Cadena de alto rendimiento - esto es por los tendones para el más fuerte mejor, Dyneema es el mejor y se utiliza en la pesca, deportes y camping así deben fácil encontrar - 1.5 a 2 mm de diámetro es un montón lo suficientemente fuerte, dejar 1 m por dedo
Cuerda de amortiguador auxiliar choque - las cosas buenas es de grado marino para embarcaciones - 3 a 4 mm de diámetro por 4 cm por dedo
Pegamento - un tipo de gel de ajuste lento es mucho más fácil de manejar, un tubo a hacer docenas de dedos
Pulverización en frío - también conocido como freeze spray, spray de hielo y aerosol frío instantáneo, una poder de la clase que venden en las tiendas de plomería debe estar bien
Teflon - un trazador de líneas de cable bicicleta solo engranaje o un paquete de hoja de Teflon autoadhesiva (el tipo con una capa fina de doble cara espuma, no el grueso resistente los con una capa de goma sólida) como para los controles deslizantes de muebles
Lycra - como se utiliza en deportes del engranaje, la expandible mejor, permite 10x10cm por dedo
Tubo de aluminio, redondo - alrededor de 12 mm o 1/2" de diámetro por 1 m
Herramientas:
Recipiente de cocina - capacidad recién agua hervida, el vidrio es mejor para que puedas ver la fusión Shapelock (polimorfo)
Hervidor de agua - cualquiera va a hacer
Horno de microondas - cualquiera va a hacer
Pistola de aire caliente - como se utiliza para pelar la pintura
Non-stick rolling mat - cualquier barato silicona laminado alfombra para pastelería debe ser fino, Ikea también venden una estera de trabajo transparente de polipropileno que es perfecta y en un impulso va a hacer la tapa de un tupperware de buen tamaño
Rodillo antiadherente - cualquier rodillo de silicona baratos para pastelería debe estar bien
Pequeño trozo de hoja de aluminio - utilizado para el despliegue de salchichas del material, otra vez usted puede conseguir lejos con el uso de una tapa de tupperware
Tijeras - si usas Dyneema Haz tijeras corte Dyneema, no realmente
Cortadores - un viejo par Romo es realmente mejor
Alicates - los más aprovechan mejor
Soldador - la pistola de soldar de Weller da un mucho mejor control que un soldador estándar
Una vez que tienes todas estas cosas juntos es hora de que parte 2: una cartilla sobre Shapelock (polimorfo) rápidamente seguido por la parte 3: Cómo hacer una mano de robot
")












