Nuestro primer aporte a la comunidad de E-no se puede.
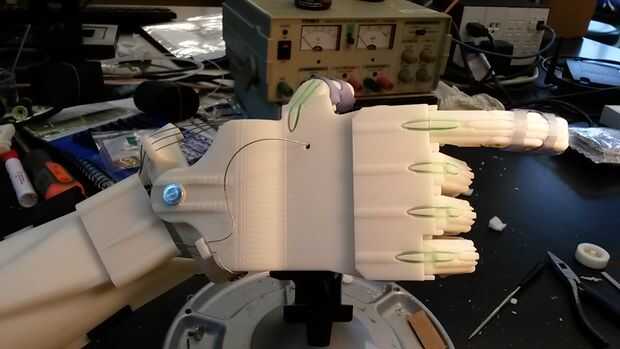
Esta mano es que una plataforma de investigación para el desarrollo de varios 3d impreso ideas protésicas. Es decir, la desviación Radial-cubital había controlado patrones de agarre, cables eliminados elástico cordón blando control, eliminado nudo atar, hardware mínimo y una nueva idea de tensión.
Esta versión de la mano de halcón no está diseñada para ser apto para un paciente real como-es. Nuestra esperanza es que estas tecnologías trabajan su manera en los diseños de la mano ya aceptado como bestia Cyborg, Talon y mano Flexy.
Lista de materiales:
1. varios elásticos dentales
http://www.Amazon.com/Clear-Orthodontic-elastic-br...
http://www.Amazon.com/Neon-Medium-Orthodontic-ELAS...
2. 3 x 3/16 pulg by1/2 pulg. Tornillos de Chicago
3. acetona y un hisopo de algodón
4. impresas partes de Thingiverse
5. http://www.amazon.com/Lee-Tippi-Micro-Fingertip-Gr... (Opcional pero recomendado)
6. de velcro que puede cortar a la longitud
Enlace a los archivos de Thingiverse:
http://www.thingiverse.com/Thing:418398
Enlace a la Web de E-no se puede:
Créditos diseño y desarrollo: Dr. Adam Arabian, Sean Russell y Barrett Estep.

")


")








")