Paso 1: premisa
Este Instructable detalles de cómo construir una mano animatronic básicas controlable por servo. Es parte de una serie de "Bricolaje prótesis" más grande, sin embargo también puede ser utilizada para otra mano robótica relacionadas con propósitos. Si usted está interesado en el potencial de aplicación como una prótesis sin embargo detallo esto más en profundidad a continuación.
Hay una gran variedad de manos genial animatronic DIY en línea, sin embargo para este proyecto quería construir algo que realmente funcionan como una prótesis, no sólo un apoyo. Además de funcionalidad, lo necesitaba para poder ser replicado, a un precio razonable, y básicamente algo que nadie podía en su casa.
Por supuesto para alcanzar aún el primer objetivo (funcionalidad), sería necesario incluir no sólo el aspecto mecánico que consta la mano, pero también un sistema de control que permitió la mano para ser usado así, una mano. Esto presentó un poco de un desafío. Prótesis modernas comúnmente funcionan de tres maneras, ya sea mediante EEG o algún otro tipo de conexión mental que le permita ser controlado por el pensamiento (demasiado caros y precio accesible auriculares tienden a ser incómodos), golpeando en los nervios (demasiado peligroso y complicados) o por mediante la utilización de otros músculos para la acción (pensé que si tienes que usar tu mano izquierda natural para operar la prótesis derecha no hay mucho de un punto).
Finalmente me conformé con un diseño. Pensé que la manera más eficiente para construir una mano prostética del "Bricolaje" realmente sería acercarse es lo menos como estoy tratando de construir una extensión de la persona, y más como estoy construyendo un sistema robótico independiente pueden operar en conjetura con la persona. En esto, nació la mano protésica de reacción. Esta prótesis funciona de forma refleja, actuando en respuesta a su ambiente. utiliza sensores y Pmods para entender su entorno, luego posteriormente la intención de los usuarios. Entonces actúa sobre su intuición.
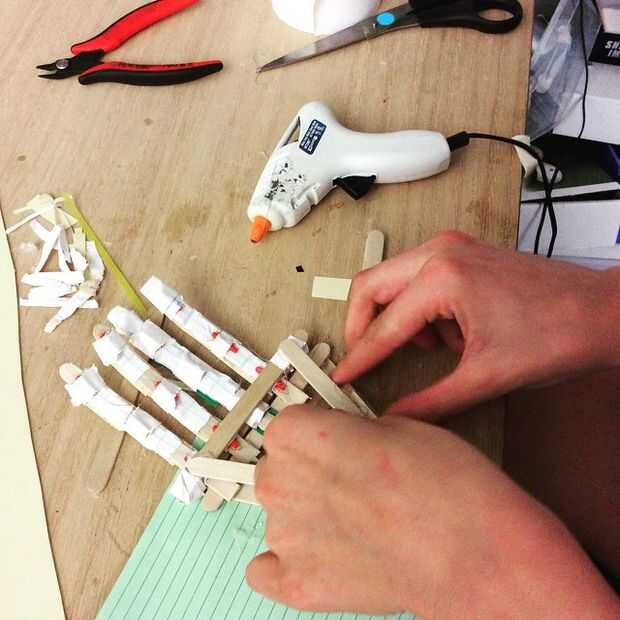
Para esta mano específicamente, es un movimiento básico abrochaba. Tiene un grado de movimiento y es capaz de recoger pequeños objetos ligeros. También es capaz de realizar tareas básicas relacionadas con la mano como un apretón de manos, onda, hombro roscado, ect.
El diseño actual utiliza un uC32 chipKIT y un telémetro ultrasónico para detectar objetos cerca y cierres cerrados en algo cada vez más cerca de 6 pulgadas.

")

![Mano prótesis Steampunk para un guerrero herido PT. 1 [ahora más fotos]](https://foto.askix.com/thumb/170x110/d/bf/dbf4c214847bfcbac4037455a8d4282c.jpg "Mano prótesis Steampunk para un guerrero herido PT. 1 [ahora más fotos]")



")





