Paso 3: Construcción de la mano
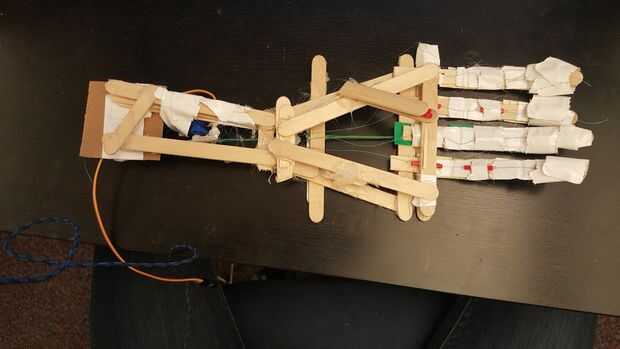
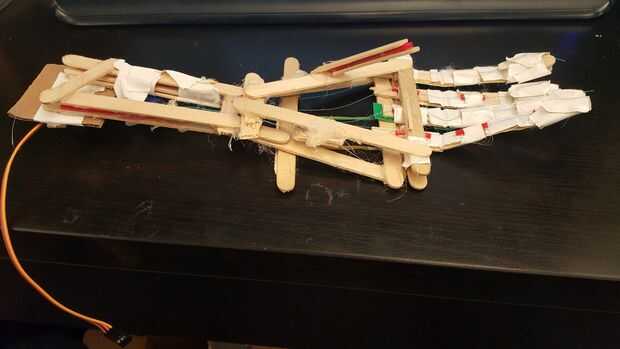
Para la construcción física de este mano construir la palma. Lo hice haciendo dos triángulos con palitos y pegamento caliente. Entonces comencé a construir los dedos (que eventualmente se pegan entre los dos triángulos. Cada dedo era construir el mismo, con la única variación la longitud. El pulgar no se mueve en mi diseño y es simplemente una paja con palitos calientes pegados a los lados, montados en un ángulo de 45 grados desde la palma.
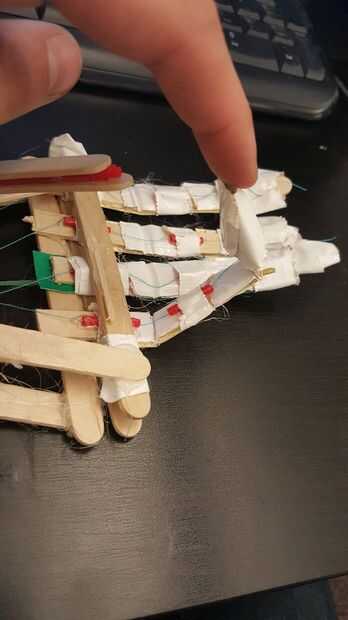
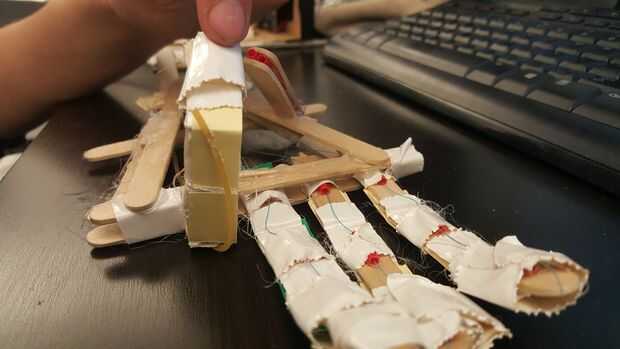
Para cada uno de los otros cuatro dedos, tome un solo palito y cortar en tercios. Continuación del conducto cinta juntos nuevamente pero usando la cinta adhesiva para crear una pequeña astilla de espacio entre las articulaciones, que actúan como una especie de bisagra. Luego cortar la pajilla de café que tercios de longitud y cinta en las uniones en el interior de cada dedo. Ejecutar su hilo o cadena a través de cada uno y de la cinta en la parte superior del dedo. Luego tomar tu goma y cortarlo. Cinta a la parte superior del dedo, luego en la parte posterior de la palma (Asegúrese de que su un poco tenso) crear tensión por lo que la mano se queda abierta.
Finalmente ejecute el hilo entre las piezas de Palma dos triángulo y la muñeca. Para construir la muñeca hice dos rectángulo pequeño y luego pega el servo pequeño entre ellos por lo que se podría conectar al hilo. Usé pajas como marcadores de posición para el resto del rectángulo. Luego pegué la muñeca en la parte inferior de la palma.
Opcional: Puede montar o la uC32 directamente sobre la mano para controlar el servo o puede agregarle un cuadrado de cartón de pequeño 3 X 3 pulgadas en la parte inferior y coloque el brazo en la Base intercambiable.

")

![Mano prótesis Steampunk para un guerrero herido PT. 1 [ahora más fotos]](https://foto.askix.com/thumb/170x110/d/bf/dbf4c214847bfcbac4037455a8d4282c.jpg "Mano prótesis Steampunk para un guerrero herido PT. 1 [ahora más fotos]")



")





