Este Instructable es demostrar cómo controlar un servo con un sensor de flexión de la curva. También una posible aplicación para tal configuración.MaterialesArduino unohttp://www.adafruit.com/products/50 $24,95Cable de núcleo sólidohttp://www.adafrui
nivel de experiencia: intermedio (requiere de soldadura)Tiempo requerido: 3 a 5 horas dependiendo de la experienciaJ-BOT Kit JamecoAlguien mencionó que Jameco necesitaba una mascota robótica. Siempre he sido un manitas, especialmente con la electróni
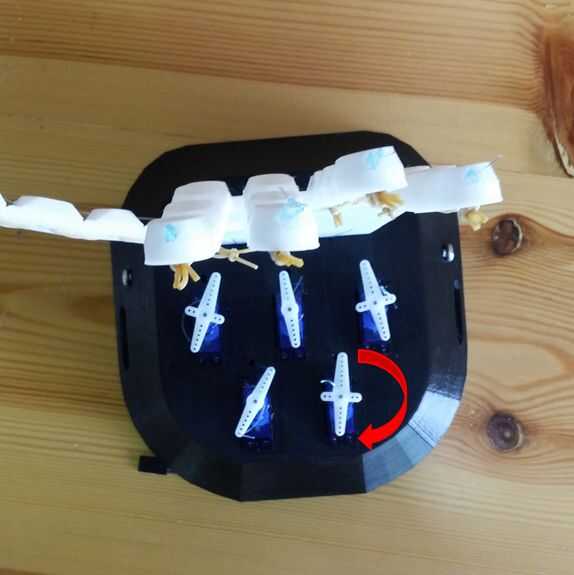
El objetivo principal de este proyecto es proporcionar una mano protésica altamente funcional y de bajo costo para personas con amputaciones por debajo del codoAunque se han desarrollado muchos dispositivos prostéticos de vanguardia, todavía se convi
Gracias a instructables, he recibido un kit de Intel para el transporte y seguridad. Estoy disfrutando mucho y el juego es impresionante. Voy a intentar crear una serie de instructables con la evolución de mi proyecto y estoy empezando con el sistema
* actualización * sólo quería añadir un poco de cómo publicar este Instructable ha positivamente me impactó. Además de la maravillosa recepción y la retroalimentación que recibí en los concursos y el éxito que ha tenido en los concursos me ayudó defi
Este es mi proyecto escolar para 5 º año de secundaria (yo soy italiana, tenemos 5 años de secundaria).Consiste en una mano artificial controlada por un guante con sensores de flexión. La mano artificial reproduce los movimientos de la mano con el gu
Empezamos mirando cómo el Sensor de curva está construída para arriba, y cómo funciona.Luego analizamos diferentes áreas en que podemos verlo siendo usado.Finalmente hicimos una lámpara eran puede cambiar color de la luz y también el brillo de un LED
para Feria de Ciencias este año, sentí como algo en vez de hacer un experimento. Todo lo que necesitaba hacer era mirar alrededor Instructables para una idea de proyecto. Me inspiré por mano robótica de njkl44 desde que recuerda mucho de cosas de pel
== > Este proyecto obtuvo el 2 º premio en concurso de robótica de 2016.Muchas gracias por los votos ;-)El propósito de este proyecto es construir un Robot seguidor de línea con control PID. También utilizamos un dispositivo Android para configurar f
Si usted siempre quiso hacer una mano de animatronic que es controlada por su propia mano y pensaba que pagando alrededor $10 por solo flex sensor es un poco demasiado, entonces este instructable es para usted.Piezas necesarias:un pedazo de tubo IVci
este es mi primer robot autónomo. He construido para explorar la conexión de varios sensores a un procesador PICAXE. Su misión es buscar un imán (Polo Sur) a través de sus sensores de efecto Hall y evitar obstáculos mediante sensores de reflectancia
Junto al obstáculo evitando robots, el bot de principiante más común sería un seguidor de línea. Yo amo a seguidores de línea, y son algunas de mis compilaciones favoritas del fin de semana. Es tan divertido ver bot un poco siguiendo la línea negra p
Este es un básico barato cuatro motores, cuatro sensores, objeto programable 8051 evitando robot usando breadboad. Este robot puede utilizarse también como una línea que sigue el robot simplemente cambiando el programa. He instalado dos baterías para
Estas instrucciones de intentan asumir muy poco. Que si se puede arrancar un Raspberry Pi y tiene conexión a internet debe ser capaz de completar este pequeño gran proyecto.Básicamente, este es un proyecto que resultará en algunas áreas específicas q




")








 - neurálgico Fablab")