Paso 3: El mecanismo del brazo de







Puesto que el robot imita la mano humana, me gustaría bucear las distintas partes de los robots 'Brazo' en el:
- Hombro
- Codo
- Muñeca
- Mano
El hombro y el codo, básicamente labores todos son los mismos. Para ambos, he utilizado algunos toque muy alta 4 RPM 24V DC 'Motores industriales' para levantar casi cualquier cosa que yo quería. Ambos se unen entre sí con la ayuda de algún peso ligero, tubo de aluminio fuerte que rescatado de antiguos titulares de cortina y usarlos sólo hizo un acoplamiento muy frugal pero eficaz para fijar el motor al tubo de aluminio.
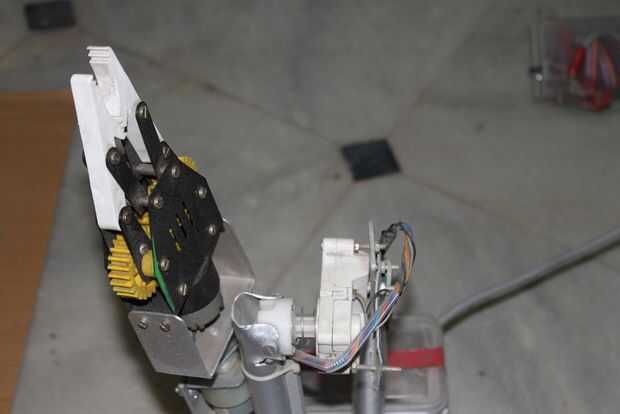
Para la muñeca usé 30 RPM a motores de la c.c. 12v con un acoplamiento que compré en la ferretería la garra o mano.
La mano o la garra es un simple montaje de unos engranajes y un motor que gira el engranaje de gusano que en giros de vuelta los dos marchas al mismo tiempo retraer o extender la garra dos como partes. Todo esto es engrasado encima y encerrado en una carcasa de metal de hoja fino.
Todo el robot, tornillos y tuercas se utilizan para asegurar todo en su lugar. A través de todo el brazo, tubo flexible y paja bendy fueron utilizada para mantener los cables aseado y compacto junto con unas abrazaderas de plástico aquí y allá.





")



")
")

