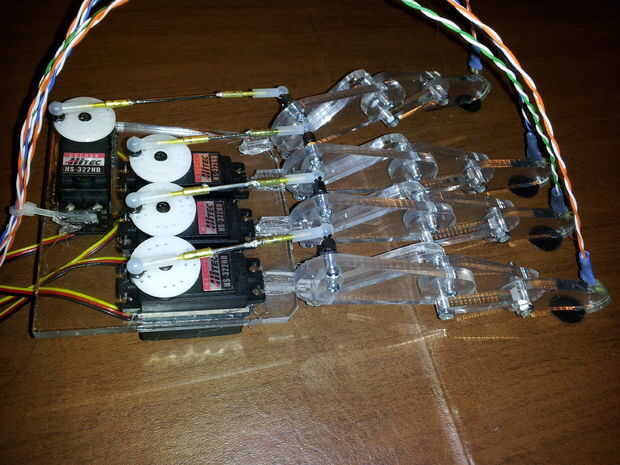








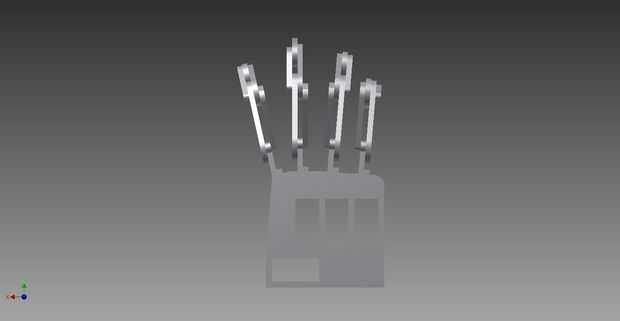


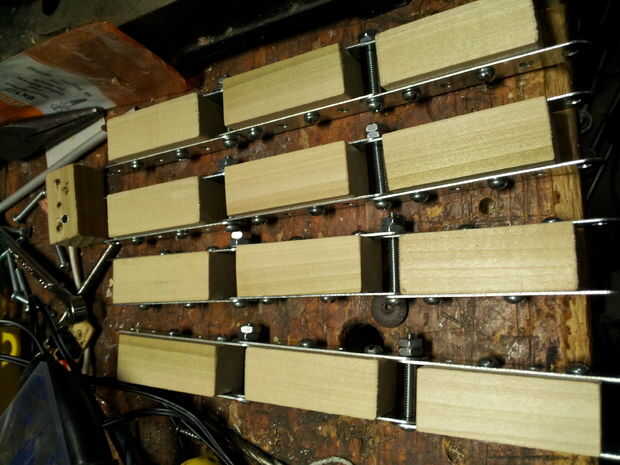
La mano robótica, he bosquejado un diseño básico en Autodesk y utiliza la característica de ensamblador para jugar con y afinar algunas de las medidas de dedo. Una vez tuve mi diseño listo, tomé a mi hackerspace local y todo el laser de piezas cortado de una hoja de acrílico que era de unos 5 mm de espesor. Todas las partes del dedo atornillados. En cuanto a fijar los dedos a la palma, se rascó las áreas donde el acrílico superpuestas y pegadas las piezas. El pegamento funcionaba bien, pero si construyo otra mano, va ser empernadas encendido. También hubo algunos problemas con la colocación de los agujeros en los segmentos de dedo, pero un poco de pegamento a los pernos de anclaje hacia abajo. Para evitar este problema en los diseños posteriores, yo utilice los pernos más pequeños y tratan de cortar tanta superposición material como sea posible.
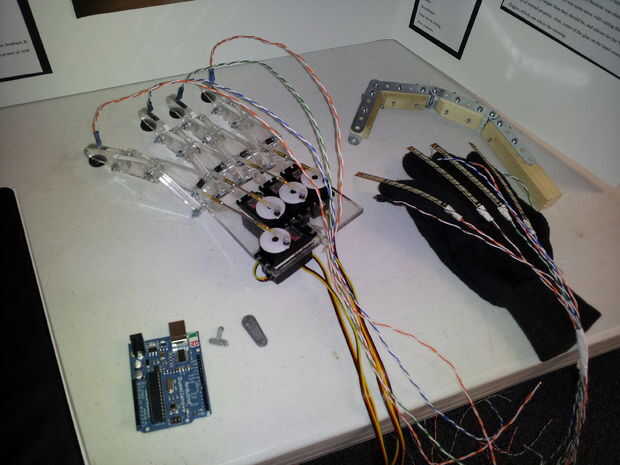
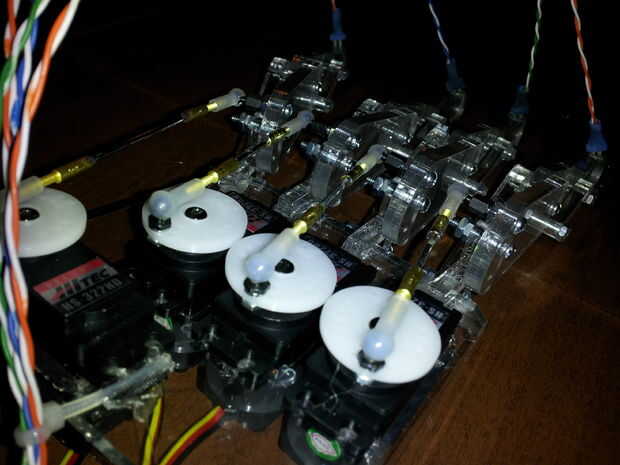
Para cablear todo juntos, encontré cable CAT-5 pelado algo conveniente. Es un poco tieso, pero sale como los pares del cable.
También, hay sólo cuatro dedos en la mano ya que había espacio solo para cuatro servos en el área de la palma. Para conseguir un dedo pulgar en el futuro diseños, voy a bien pasar uno de los dedos robóticos al lado y mover que los sensores alrededor en el guante, o simplemente comprar algunos servos más pequeños para hacer todo lo que cabe.
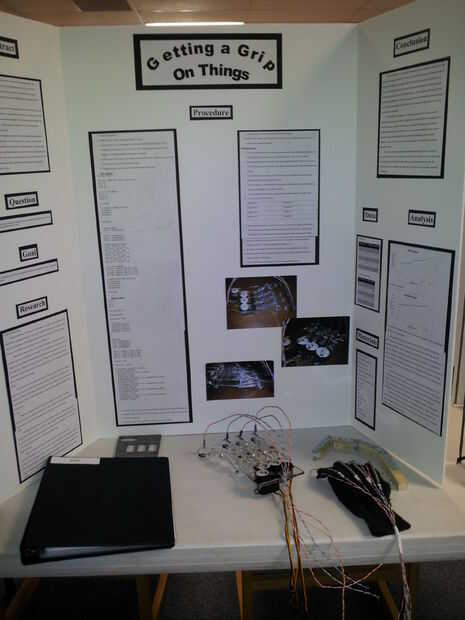
En total, el proyecto resultó bien y proporcionan un gran punto de partida para futuros proyectos. Eventualmente se retomar este proyecto, y cuando lo hago, sin duda se convertirá en un Instructable paso a paso.


 (impresión 3D)")








