Paso 2: Sistema de Control
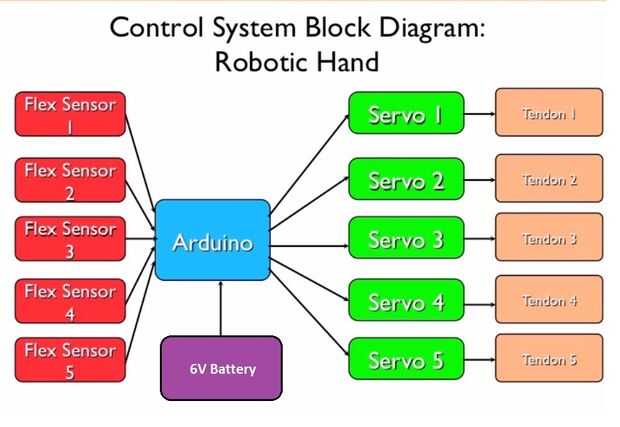
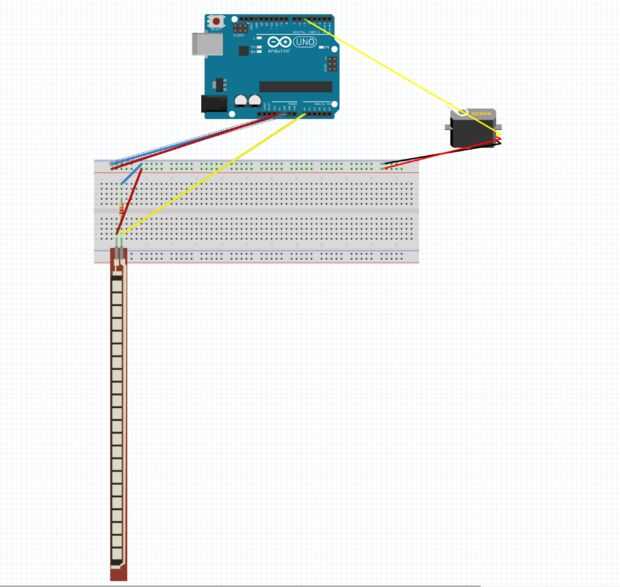
El sistema de control consiste básicamente en un arduino en el corazón de la operación de recibir entrada de los sensores de flexión en el guante usado por el usuario, que a su vez, replica los datos recibidos y mapas sobre los correspondientes servos. Cada servo, a su vez, atraerá un hilo de nylon que se adjunta a un dedo de la mano. Los servos requieren su propia fuente de energía para maximizar la funcionalidad, por lo que utiliza una fuente de alimentación de 6V de 4 pilas AA. Como se puede ver, el sistema de control es muy sencillo, ya que implica un sensor flexible conectado a una resistencia de ohm 22 k alimentación de datos para el arduino que luego se replica en los servos. Los datos, ser leídos por el arduino están el valor de la resistencia del sensor flex. El sensor flexible se dobla, se cambia la resistencia presente y esto usado en el código de arduino. Parámetros por lo tanto se establecen partiendo de cada sensor doblado y unbent estado y usado para mover cada servo de 0 a 180 grados.







 (impresión 3D)")




