Paso 4: Producto Final
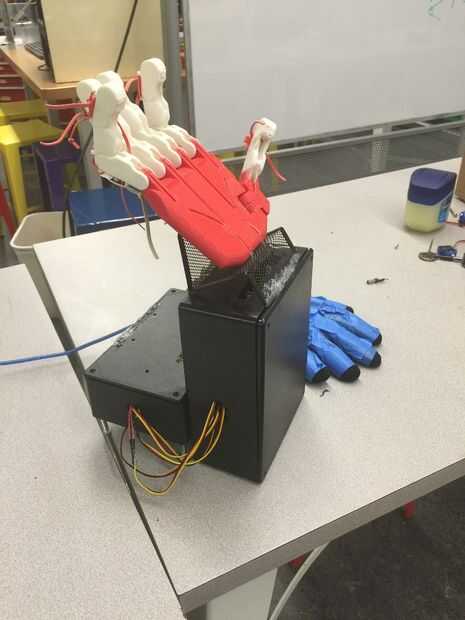
Ahora que el arduino se carga con el código que es el momento de configurar el guante de la energía. En esta ejecución, los sensores de flexión fueron unidos al guante con cinta. Para ser precisos, cada sensor flex fue grabado en la parte superior, luego pegado a la parte superior de cada cifra y luego una "cáscara de la cinta fue hecha. dos tiras de cinta fueron grabadas en el medio, por lo que el centro no tendría pegamento en él y le de los lados, para meter en el guante y deje que el sensor de curva. Dicho esto, esta no es la única manera de hacer un guante de poder. Pueden utilizar otros métodos como "bolsillos" de costura en cada dedo para cada sensor. Todo lo que queda es soldar cada flex sensor a dos hilos que alimentan su sistema de control, y el guante de la energía se acaba.
Tiempo para ajustar el código de arduino para el guante de la energía. Declaraciones de impresión pueden utilizarse para generar los valores de resistencia de cada sensor flex cuando están dobladas o unbent. utilizar los valores de resistencia mínima y máxima de estas lecturas y modificar el código a los nuevos parámetros. Ahora, el arduino está listo.
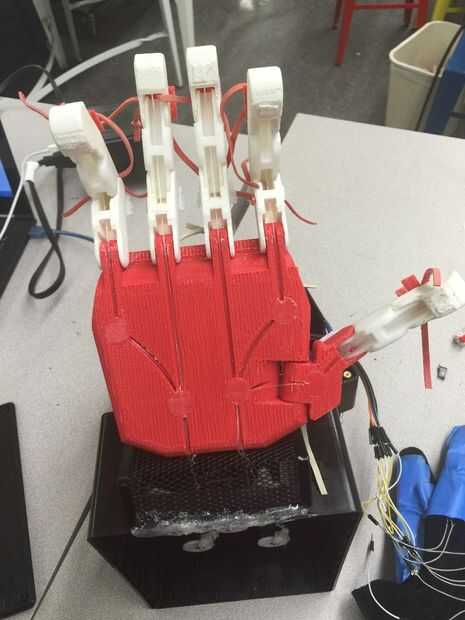
El siguiente es el montaje de la mano robótica. Cada pieza encaje en su lugar muy fácilmente con poca fricción, aunque eso no puede ser cierto dependiendo del trabajo de impresión, aunque si es un problema, jalea de petróleo puede ser usada. Caliente de nylon del pegamento a la parte superior de cada dígito y alambre a través del chisme, entonces lugar una banda de goma entre dos dígitos en cada dos muescas y la mano sí mismo está lista.
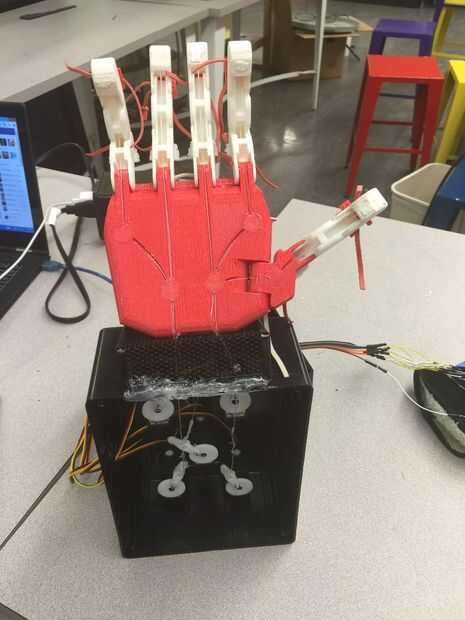
Gama del servo no es suficientemente ancha como para tirar un dígito entero, lamentablemente, así ampliando su gama es necesario. En esta ejecución, cada servo tiene otro eje servo atornillado sobre ella para ampliar su gama, aunque pueden utilizarse otros métodos. A continuación, pegamento caliente cada servo en un marco o caja. Posición de cada servo en la posición de 180 grados y pegamento caliente la mano a la parte superior del marco. En esta ejecución, se usó una caja, tener un agujero en la parte superior para el cableado de alimentación a través de. Ahora, ate cada tendón al servo correspondiente, asegurándose de que el dedo se contrae totalmente. Esto asegura el servo totalmente contratos como cuando desea alcanzar 180 grados.
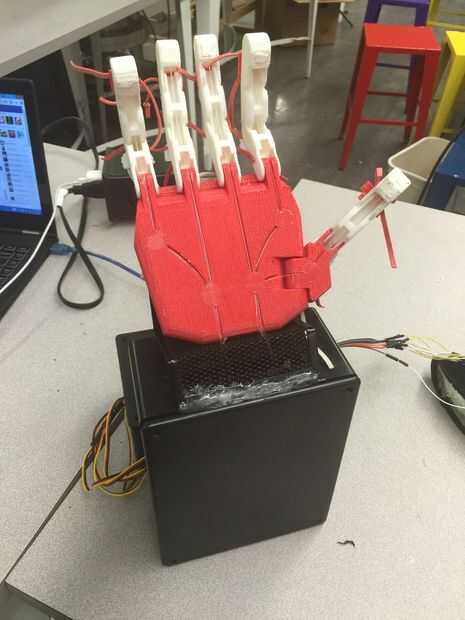
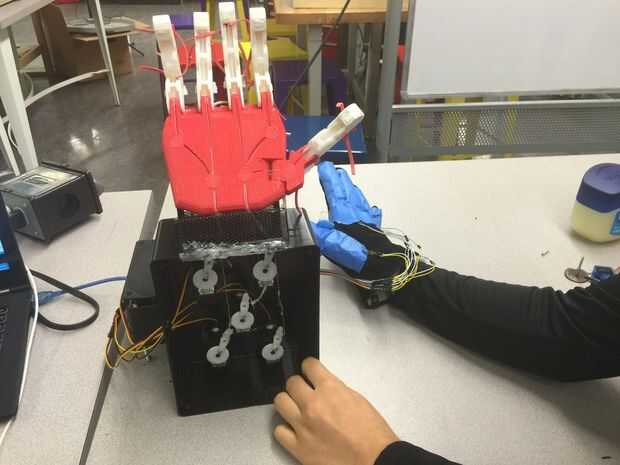
Conectar todo, coloque el arduino y el cableado en otra caja (también es conveniente, ya que funciona como un soporte para evitar que la mano caiga) instalar la fuente de alimentación externa y probarlo. No dude en continuar a jugar con el arduino codificación de parámetros para los sensores de flexión, como una ejecución impecable en la primera prueba no es esperar.
Y sobre el resultado final de todo el trabajo duro en el proyecto! Si has hecho esta lejos, entonces Felicidades y gracias por poner el esfuerzo en replicar mi proyecto!







 (impresión 3D)")




