Paso 1: Hacer el DIY sensores de flexión/prensado

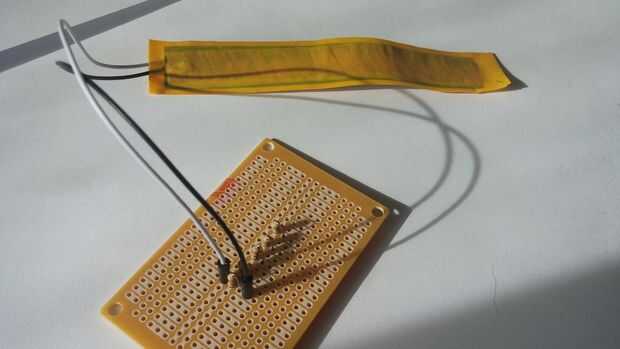
Flex/presionar los sensores son dispositivos de una resistiva que pueden disminuir su resistencia en proporción a la cantidad de su doblar en cualquier dirección.
Utilizamos estos sensores para comunicarse entre el guante y la mano robótica.
Es que todos los componentes que usted necesita:
-Tiras de cobre delgadas - 0,5 mm
-Electroconductor ESD bolsas
-Hilos - 10-15 cm de largo
-Cinta
-Soldador
Todos los pasos que vas a necesitar para hacer los sensores se describen en el video.
https://www.youtube.com/watch?v=QbHFS0TpEV4&feature=youtu.be



 (impresión 3D)")





")
