
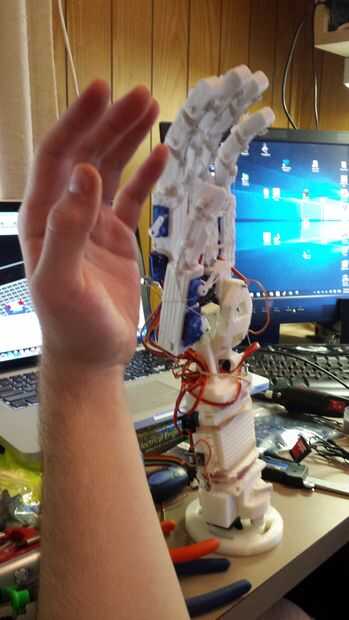
Hola a todos! Este es mi prótesis de mano y el brazo de prototipo he estado diseñando desde hace varios meses. Es todavía un poco de un trabajo en progreso, y ya que estoy terminando con clases en la Universidad para el semestre aún no he tenido tiempo para desarrollar su funcionalidad completa. Aparte de ser esencialmente completamente imprimibles 3D (con la excepción de los cables electrónicos y de actuación), está diseñado para ser capaz de todos los movimientos de una mano humana sana y brazo por el codo (que actualmente estoy diseñando). También es compatible con las capacidades de movimiento adicionales que no tienen manos más robóticas: se puede doblar y enderezar los dedos independientemente, pero puede (pudiendo) también los señalan en diferentes ángulos y rectas - todavía estoy recibiendo el código para esto. It (se puede poder) también separado los dedos, un movimiento que sólo he visto por 1 otro robot humanoide (aunque todavía no he conseguido que haga un correcto Vulcano saludo). En el largo plazo planeo en la construcción de un guante de control de movimiento y continuar construcción hasta al menos el hombro y posiblemente hacer un sistema de control utilizando un Kinect o un movimiento de salto. Por ahora, sin embargo, se pueden realizar más movimientos de la mano introduciendo manualmente los comandos a ejecutar movimientos preestablecidos o para controlar individualmente cada servo.
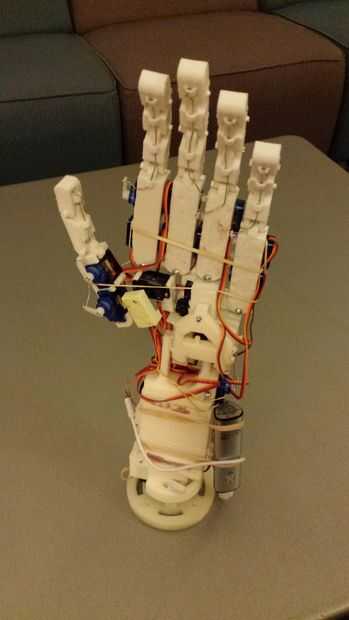
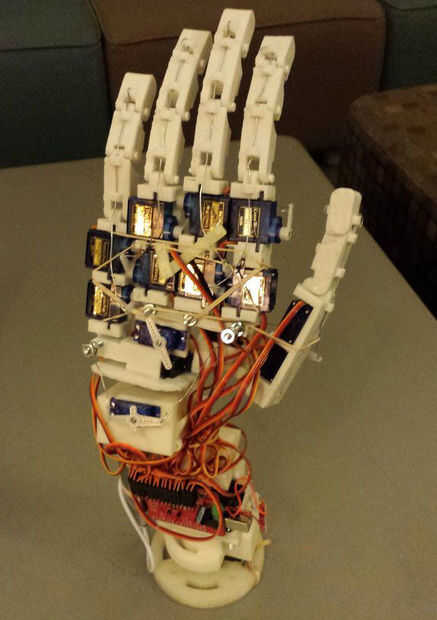
Mi principal objetivo es imitar el movimiento de una mano humana y el brazo lo más cerca posible, para cada articulación se coloca tan cerca como yo podía ir a su ubicación en un ser humano real (me). Después de un montón de rediseñar he conseguido encajar todos los servos de control de dedo en un área levemente más grande que mi mano - el dedo pulgar toma un poco más de espacio en el lado y la parte que Coloque todos los dedos que extiende un poco lejos de la palma. Los dedos todos difundir lejos de la media y el pulgar gira sobre 2 ejes de una manera similar al pulgar humano, aunque son los ejes en ángulos ligeramente distintos. La muñeca gira sobre dos ejes y se une un poco más atrás que una mano humana para el para arriba y abajo de movimiento, pero en el lugar correcto para girar de lado a lado. Todo esto puede torcer en la base del brazo, que es dos pulgadas de donde será la articulación del codo.
El brazo entero fue dibujado y renderizado en Inventor Fusion e impreso en 2 Solidoodle. El costo final de piezas en algún lugar es alrededor $100, aunque gasté más en desarrollo y envío. He estado trabajando en esta (parte) a tiempo parcial durante varios meses, más de la que ha sido el proceso de diseño. Los resultados pueden variar pero probablemente tardará mucho menos tiempo para construir tu propio que diseñarlo desde cero.
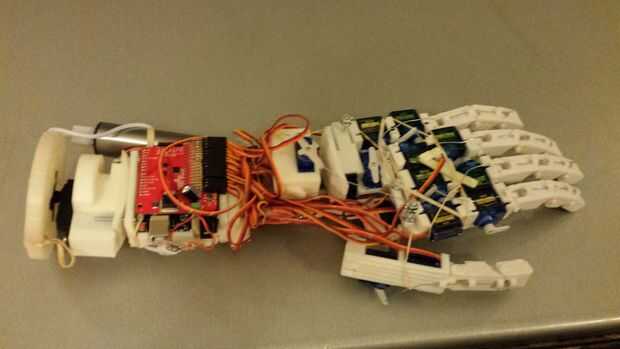
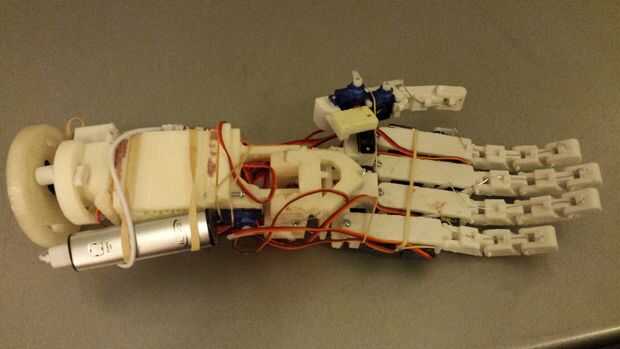
Un aspecto único de este brazo es que se construye en módulos, para que las piezas pueden ser modificadas según sea necesario para cambiar el tamaño deseado del brazo. Podría añadirse un espaciador para que sea más largo, o la muñeca podría sustituirse enteramente sin necesidad de rediseñar la mano. Una vez que el brazo entero, esto permitiría también conectar herramientas de aplicación específica a la articulación del codo o en otro lugar.
UPDATE 5/16: Añadido un vídeo y actualizado el programa para la función de onda (no física cuántica implicada, lamentablemente). El programa también contiene un gesto inacabado que tipo de trabajos, pero pensé que sería bueno por lo menos poder agitar su mano robótica. Nota que la función no clara (Costa) todos los servos al agitar es terminar... sin embargo.
¿Por lo tanto, desea construir uno? Ir al siguiente paso y empezar!





")






