Paso 4: La mano: Junta los dedos
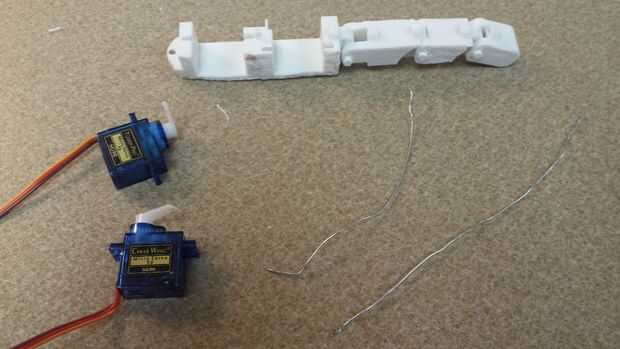


Cada dedo (excepto el pulgar, cubierto por separado) requiere 3 piezas perno común para conectar los segmentos (cuadro 2). Puede sustituir un corto 1/8" tornillo de aquí, pero estos pines impresos 3D funcionan muy bien. Como se mencionó anteriormente, es muy importante que hay como poca fricción como sea posible en las articulaciones - deben moverse con facilidad a mano (es decir, manualmente - ningún retruécano previsto) dentro de sus rangos de movimiento. Para ello, asegúrese de que las clavijas de articulación son cilíndricas como posible y no hay separación entre las superficies de conexión de los segmentos. Usted probablemente encontrará más fácil montar los pernos perfore los agujeros 1/8 ", a menos que la impresora tenga tolerancias circulares excepcional.
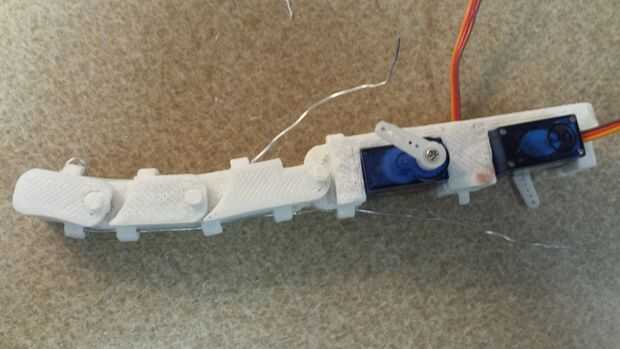
Asegúrese de usar las partes correctas para cada dedo, de lo contrario podría parecer algo deforme y no moverse adecuadamente. Una vez que han reunido las piezas impresas 3D, deslice los servos en las ranuras en el carpo (la pieza más grande) de la misma manera que la última foto en este paso. Los servos deben ser arreglados correctamente o si los dedos no encajan bien en la palma, si en todos.
Antes de colocar los cables y brazos de servo, el dedo debe estar en la orientación correcta: enrollamiento hacia el interior en cuanto permite al colocar el alambre superior y enderezar al colocar el alambre inferior. Esto asegurará que ambos servos pueden girar a través tanto de su rango de movimiento posible.
En las fotos ya tenía la correcta longitud de cable necesaria, pero cuando le estás tirando un carrete ayuda a pasarlo a través de los lazos en los dedos de la parte posterior de la primera segmento hacia arriba a través de a la tercera, luego gire en un buen gancho (alicates de punta!) que no se deshace y no darán mucho cuando es tirado o empujado. Una vez que lo ligan al final del dedo, dejar salir lo suficiente como para alcanzar el brazo del servo y luego bastante extra para conectarlo a través del brazo. Siempre puede cortar cualquier extra el alambre, que es mucho más fácil que enhebrar una nueva.
Nota: he intentado imprimir un pedazo del carpo para el puntero con lazos en la parte superior e inferior para ver si esto ayudaría con el rango de movimiento. La parte superior ayudado un poco, pero el fondo terminó restringiendo el movimiento de ese servo, así general probablemente no vale la pena enhebrado a través de esos lazos.
Colocar los brazos solo los servos es un poco complicado, y pasé un poco de tiempo la reorientación de los brazos para conseguir que se mueva dentro de la gama correcta del movimiento. Para que sea más fácil calibrar más adelante, se puede esperar para atornillar los brazos de los servos hasta que después de ejecutar el programa de instalación para mover los brazos a sus ángulos de partida; de lo contrario, un buen lugar para empezar sería ser colocar cada brazo al servo tal que cuando el servo en 0 grados está apuntando directamente a ya sea el frente o la parte posterior de la palma.





")






