Paso 5: La mano: montaje de pulgar


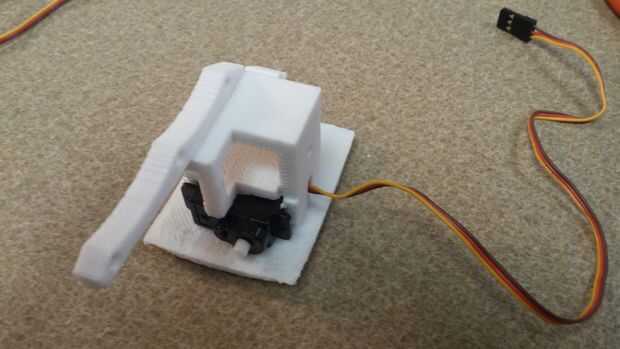
El pulgar está montado sobre todo al igual que los otros dedos con algunas partes adicionales para los ejes de rotación adicional. Siga el paso anterior para montar la parte del dedo, y luego inserte la parte 2 de la palanca de pulgar en la ranura en el carpo. Tuve algunos problemas con tolerancias en mis impresiones, por lo que no cabe absolutamente en la medida en que debe o salir muy fácilmente. Inserte un brazo de servo único en la ranura en la parte inferior de la palanca y asegúrese de que el canal en la parte superior se alinea con el agujero en el centro del cilindro de conexión servo.
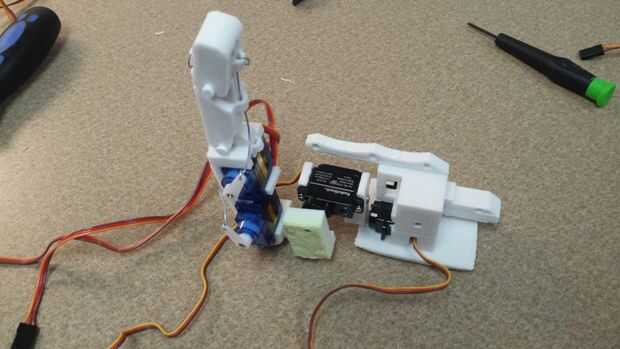
Para el montaje de la palanca intermedia, colocar un servo a la parte del pulgar palanca 1 como se muestra en la imagen y atornille por lo menos 1 de los lados. Inserte un brazo de servo único en la ranura en el lado y luego fíjelo con un tornillo o pegamento en su lugar. Hay un canal por el otro lado del del brazo de servo para permitir el acceso para el tornillo que sujeta al servo, así que asegúrese de las líneas de canal para arriba con el agujero en el centro del brazo de servo.
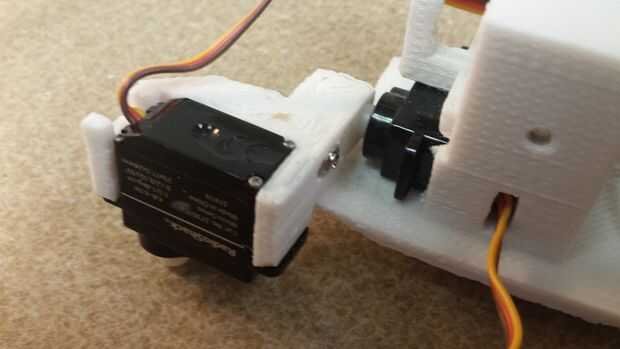
En el cruce del carpo, inserte otro servo en el compartimiento de lado como se muestra en la imagen, haciendo que al primer hilo los cables a través del orificio en el lado. En mi conjunto había ya instalado el servo en lugar bastante bien, así que no quiero riesgo de dañar o los cables tirando todo hacia afuera (tolerancias!). Coloque el brazo del servo en el canal del pulgar la palanca 1 para este servo, tal que 0 grados es el ángulo que se muestra en la imagen final. Finalmente, coloque el brazo del servo en el pulgar la palanca 2 al servo en la 1 de la palanca como se muestra en la primera foto, el ángulo debe ser tal que la orientación en la primera foto está casi en el ángulo máximo del servo palanca 2. Una vez más, es mucho más fácil de calibrar estos servos ejecutando el bosquejo de la configuración y luego colocar los brazos.





")






