Paso 2: programación

Mediante el uso de Phidgets, pude crear un robot que es controlado por Max 6 de ciclismo 74. ¿Qué significa eso? Significa que no tener que preocuparse de gcode, eso es lo que.
Lo que necesitarás:
- Software de Phidgets
- Max 6 o cualquier otro programa que hable de Phidgets
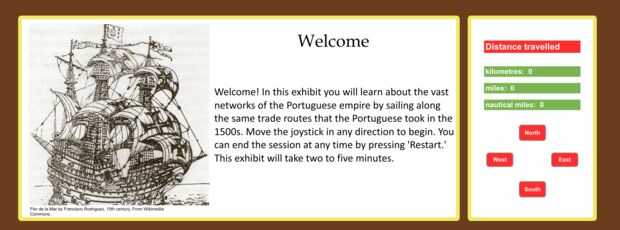
Max 6 es un lenguaje de programación visual, que me resulta útil, como un principiante. La otra gran cosa sobre Max es la capacidad para cambiar de modo de programación (o modo de "parche") a un modo de presentación, que muestra todo lo que desea que los usuarios ver y nada que no. En mi programa, solía navegación simple de juego permiten a los usuarios elegir qué "puerto" en el mapa que querían visitar a continuación. El primer video muestra una de mis primeras carreras de prueba del programa y el robot para darle una idea de cómo funciona.
Además de hacer que el robot mueva el imán de un lugar a otro en el mapa, cada parada el modo de presentación de mi programa muestra imágenes y texto, juegos audio, calcula distancia actual recorrida y muestra a los usuarios sus opciones para donde ir. Esto es donde entra el segundo vídeo, que es otra prueba de un poco más a lo largo de la programación. Usted puede leer más acerca de eso y descargar el código en varias versiones de mi blog.
Si desea utilizar el robot para llevar a los usuarios a través de una serie de caminos prefijados, como con la historia del portugués operar redes, lo primero que querrá hacer es decidir cuántas paradas desea el robot para hacer, y donde las paradas están en la base de la espuma. Continuación, elija el lugar que desea el pequeño imán para empezar en. Dirigir los motores a esa ubicación dentro del programa. Guarde y apague Max, luego desenchufe el robot; Conecte el robot de nuevo y reiniciar Max. Esto debe establecer la ubicación actual del robot en 0,0 (si pensamos en la pieza de la base de la espuma como un plano cartesiano).
Ahora que usted ha establecido una "ubicación de inicio", buscar las "coordenadas" de cada otro lugar en el camino de dirección del robot hay en el programa. Tomar nota de estos números y poder incorporarlas a su programación para que el robot sepa que sistema de coordenadas corresponde a cada lugar. Intente evitar escoger paradas que están cerca de los bordes de la pantalla, ya que el robot tiende a tener menos preciso a medida que avanza hacia los bordes.
La próxima cosa que necesita hacer es especificar la relación entre las paradas, es decir, que lo coloca plomo a que otros lugares. En Max, le dio a cada ciudad un número, entonces se utiliza un mensaje para especificar cómo se relacionaron con los números (1 conduce a 2, 2 a 3, 3 cables de 4 o 7, etc..). Los usuarios eligen donde quieren ir a basado en las teclas de flecha. Cuando una tecla de flecha se presiona, la siguiente ciudad en que se elige la dirección, las coordenadas de esa ciudad se transmiten a través de Phidget a los motores paso a paso y el imán suspendido detrás el mapa se mueve, haciendo que el imán en la parte delantera para mover con él.
** IMPORTANTE ** cuando te pruebas y usando el bot, asegúrese de que siempre volver a su lugar de "casa" antes de apagar Max y el robot. Si no, cualquiera sea su ubicación actual será recordada como 0,0, y todos sus pares de coordenadas serán lanzados!













