Paso 1: teoría
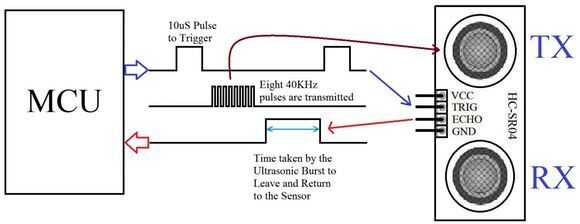
En este proyecto, estamos utilizando un sensor de distancia ultrasónico. Genera ondas de sonido más allá del alcance del oído humano y mide distancia calculando el tiempo requerido por estas ondas choca con un obstáculo y volver. Esto es similar al principio utilizado por los murciélagos.
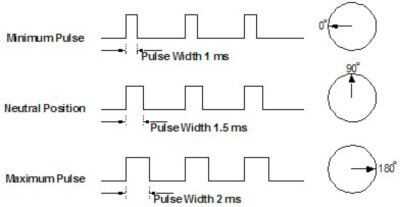
Otro componente que vamos a utilizar es un servo motor. Difiere del habitual motor de C.C. que puede a su vez muy exacto a una determinada posición angular y sostener su estado allí. Cuando un motor de servo pulsos de una duración específica, se mueve a la posición angular correspondiente.
Utilizaremos ambos estos componentes para obtener un campo de visión de 180 grados para nuestro robot.
")
")


")








