Paso 4: Electrónica + circuitos
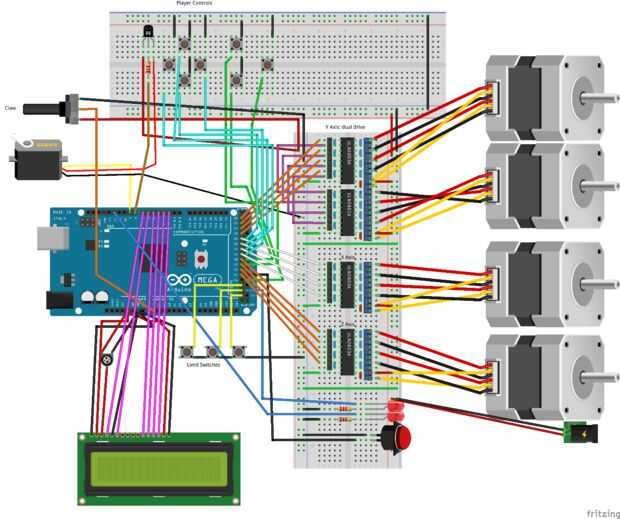
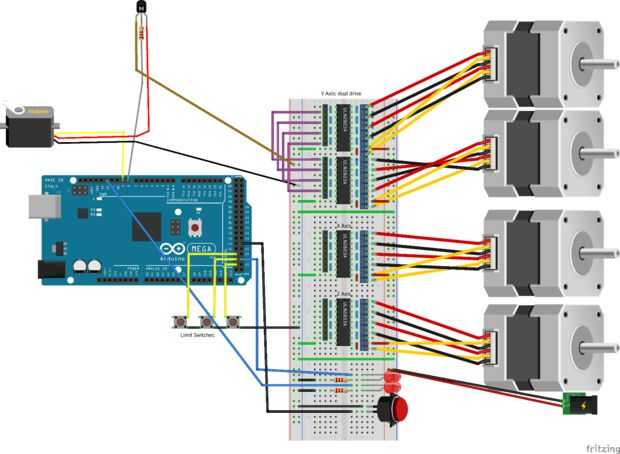
Esquemas son grandes, pero no todo el mundo puede leerlos. Opté por hacer un diagrama con Fritzing. Esto también ayuda a ver el panorama. Aquí le damos las tripas de la máquina.
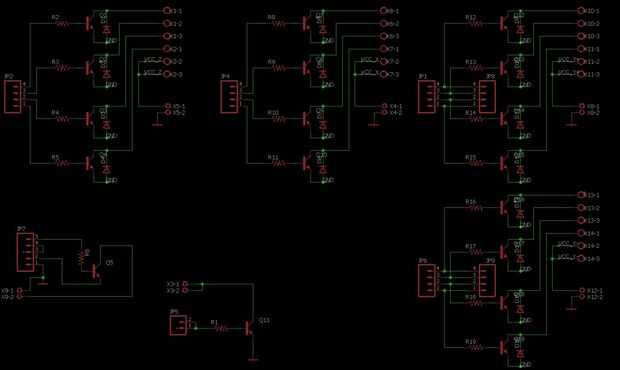
Vamos a dividir el circuito en trozos.
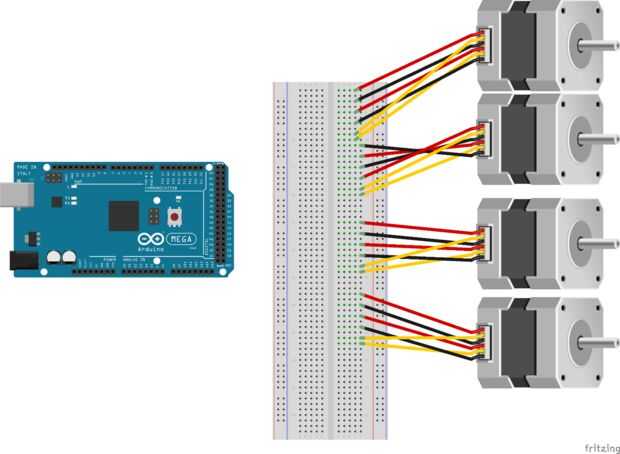
Primer alambre los motores de pasos. Tenga en cuenta que el eje Y tiene dos motores en cada lado, están cableados espejo uno al otro por lo que los motores unipolares se mueven en tándem.
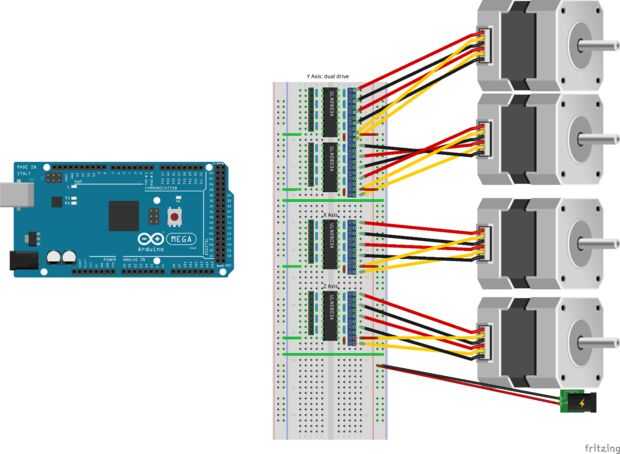
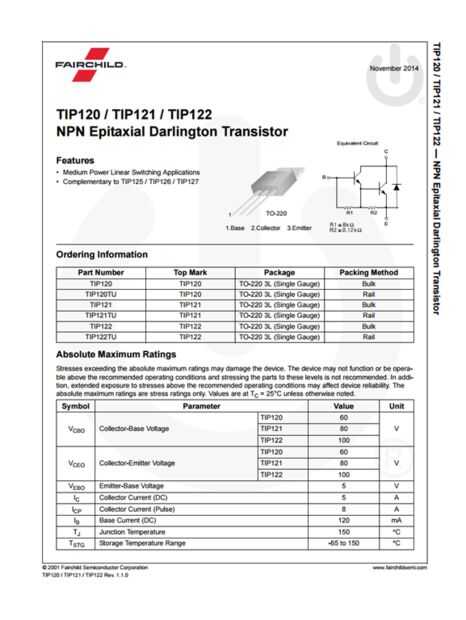
- Añadir los transistores de potencia. En realidad usé TIP120s no ULN2803s, que esquemáticamente es el mismo.
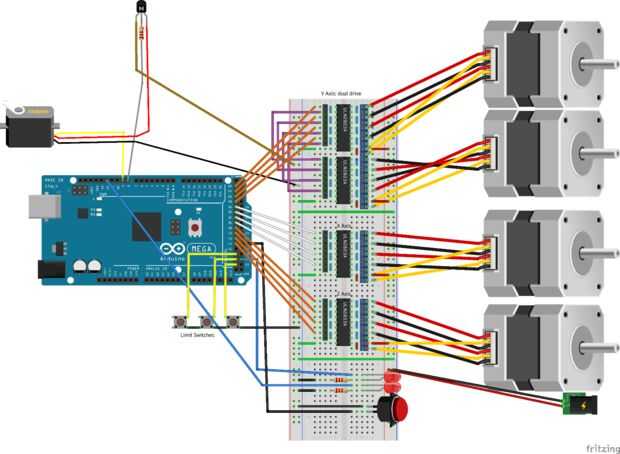
- Alambre servo motor, interruptores, LED de estado, interruptor de gatillo de moneda y poder de steppers.
- Transistor de paso a paso de cable TTL para Arduino.
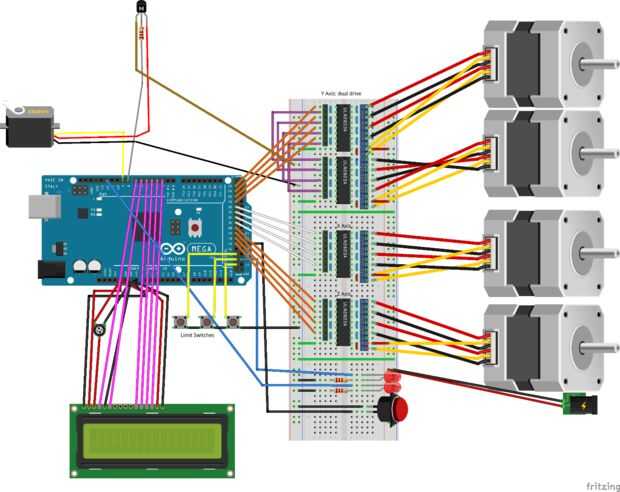
- Conectar LCD (LCD muestra las instrucciones del juego es opcional, pero bueno)
- Controles del reproductor de alambre. Esto es lo que las interfaces del reproductor para controlar el pórtico y la garra. Recuerde que la garra es mediante un potenciómetro, pero usted podría fácilmente hacer un botón en su lugar.
Pro Tips:
Tenía algunos obstáculos que superar en cuanto al motor paso a paso y servomotores. Siempre están encendidos, lo que significa cuando no esté en movimiento, tienen holding torque, o corriente de bombeo en el motor para mantener en posición. Esto propaga el calor en los conductores del ULN2803 (matrices de transistor que manejar motores paso a paso) y por desgracia estos paquetes DIP son corte para disipar ese tipo de calor (incluso cuando se conduce sólo los steppers en 5v). Para solucionar este problema, sólo escribo todos los pernos bajos cuando los motores están inactivos. Esto reduce calor enormemente. Que podemos llegar lejos con esto puesto que no se trata de perder posición motor. Desde el pórtico está impulsando el movimiento en forma de cremallera/piñón, no es necesario para la celebración de par como se transfiere la fuerza de carga perpendicular a la dirección del movimiento (o lateralmente en el eje del motor). A diferencia de una máquina CNC, no es ninguna fuerza de retroceso que un motor pierda la posición, ni ningún mal efecto si una posición se pierde. Por lo tanto los motores de la máquina de la garra no tienen par de retención que reduce energía/calor y por defecto los motores en un estado de inactividad. Ganar/ganar. Este era el plan en principio, no porque esperaba calor en el ULN2803 a ser un problema, pero yo quería ser capaz de escalar el pórtico a una máquina más grande y más grande. Con el paso a paso motores de ambos sosteniendo su posición mientras que lucha contra la gravedad con un pórtico pesado sería una manera segura de fallar temprano. Construí la versión máquina garra 1.0 usando ULN2803s, pero más tarde se dio cuenta de TIP120s donde el camino correcto a seguir. La versión 2.0 fue construida utilizando TIP120 Darling Transistor (16 en total). Estos TIP120s puede manejar 3A continuo y hasta 5A pico. Son mucho más robustos para manejar actual, y con éstos, la máquina puede escalar más grande, manejo más energía (12v) y grandes cargas. Acaban de hacer un PCB personalizado para estos transistores. Merece la pena si usted tiene más de una máquina de la garra, del edificio también hace cableado mucho más limpio y organizado dentro de la máquina. El motor servo (el motor que impulsa a la garra) también tenía el mismo comportamiento. Energía siempre está impulsada en el servo para mantener la posición de garra. Esto es un problema cuando el juego es en idle (no interpretada) como el servo motor se calienta considerablemente y reduce su espacio de vida. Miré por todas partes y a pesar de cada reclamación para decir que funciona, simplemente se puede llamar a la función "servo.detach(pin#) en Arduino. En teoría esto sería separar la señal de comunicación al servo, pero la mayoría servos no están diseñados para experimentar una comunicación 'null'. Es un estado indefinido. Ni que decir tiene que no funciona el comando "separar". La manera alrededor de esto era simplemente conecte la alimentación del servo a un transistor y apagado (con lógica) cuando el juego de la garra no está en juego. Utiliza un TIP120 para esto.
TL DR: uso TIP120s para manejar la corriente del motor paso a paso y desactivar mantenga par y potencia servo cuando juego es inactivo para reducir el uso de calor y electricidad.













