Paso 2: electrónica


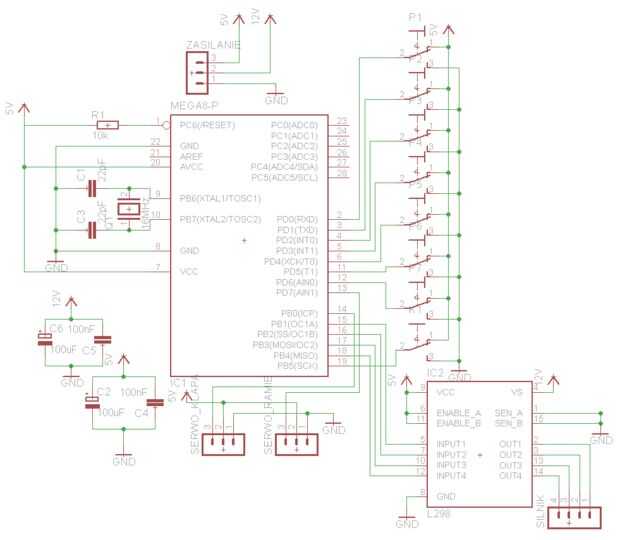
De la fuente de alimentación 12V conecté por el L298 driver para motor paso a paso. Al principio que quería usar L293 driver pero demasiado calentamiento porque mi paso a paso motor receptor 2A.
He utilizado servos y parte de la lógica de 5V. Comencé las pruebas en un protoboard. Cuando funcionaba todo todo lo pasé en la placa de prototipo.
Programa de Atmega que escribí en el IDE de Arduino. En principio quería hacerlo de C en Eclipse, pero no tengo experiencia. (código del programa) En un resumen grande, caja comienza su funcionamiento en la posición "0", mientras sostiene el contactor. es cuando más interruptores, el colgajo no se cierra. Si apaga de todos los interruptores de los aleta se cierra y bucles vacíos unos análisis, brazo regresa a la posición "0".













")