Paso 8: Prueba la nueva funcionalidad

En primer lugar, utilizando el IDE de Arduino, compilar y cargar el bosquejo FirmataPlus.ino modificado seleccionando archivo/ejemplos/FirmataPlus que sólo modificamos.
A continuación necesitamos instalar la nueva versión de PyMata que hemos creado.
En una ventana de comandos administrativos, vaya al directorio donde extrajo PyMatay el tipo:
python setup.py install
o para Linux:
sudo sudo python setup.py install
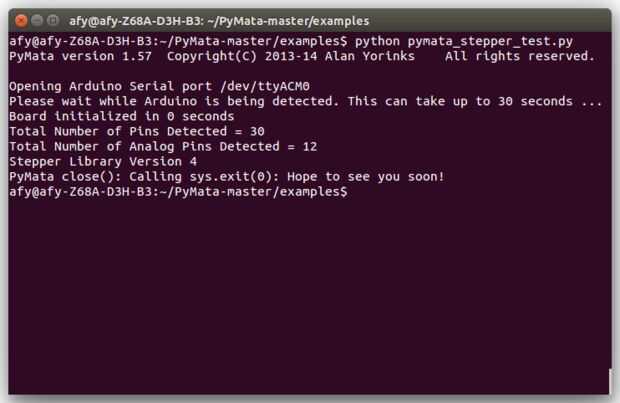
A continuación queremos ejecutar un script de prueba incluido con la distribución de PyMata . En el directorio de ejemplos de PyMata , es un python script llamado pymata_stepper_test.py (el código se muestra a continuación). Para ejecutar esta secuencia de comandos, vaya al directorio de ejemplos y tipo:
python pymata_stepper_test.py
Como se muestra en el YouTube video, debería ver el spin motor una forma y luego a la inversa.
FUENTE pymata_stepper_test.py
from PyMata.pymata import PyMata import time
# Create an instance of PyMata. firmata = PyMata("/dev/ttyACM0") # send the arduino a firmata reset firmata.reset()
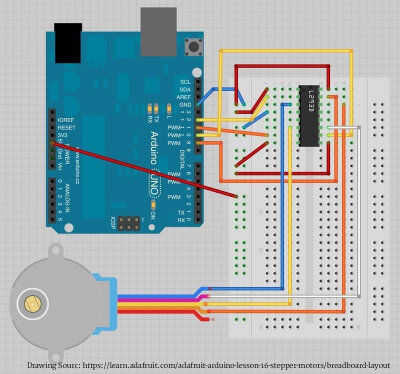
# configure the stepper to use pins 9.10,11,12 and specify 512 steps per revolution firmata.stepper_config( 512, [12, 11, 10, 9])
# allow time for config to complete time.sleep(.5)
# ask Arduino to return the stepper library version number to PyMata firmata.stepper_request_library_version()
# allow time for command and reply to go across the serial link time.sleep(.5)
print "Stepper Library Version", print firmata.get_stepper_version()
# move motor #0 500 steps forward at a speed of 20 firmata.stepper_step(20, 500)
# move motor #0 500 steps reverse at a speed of 20 firmata.stepper_step(20, -500)
# close firmata firmata.close()













 - previene el pie de pivote Slacking por los ladridos")