YouTube está teniendo problemas con las miniaturas.
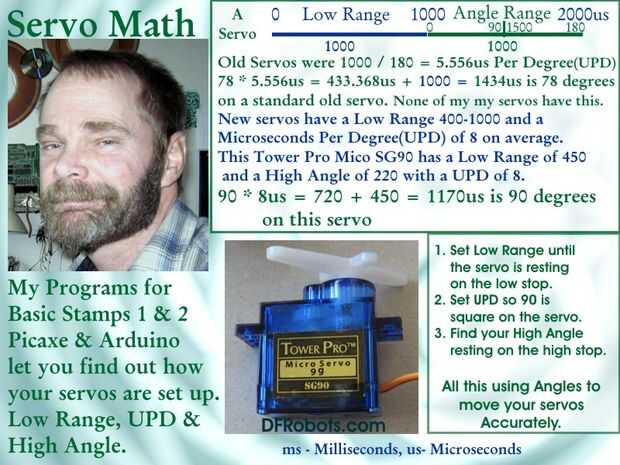
Ángulo * UPD + gama baja = el ángulo en microsegundos
78 * 5.556 = 433.368 + 1000 = 1434 es de 78 grados en un servo viejo
78 * 8 = 624 + 450 = 1074 es 78 en un servo SG90 de Micro Pro torre
La segunda etapa de Servo matemáticas cambiaba la gama baja de 1000 a 400 a 1000. Esto me dio cero en un servo. Cero es 0 grados con el cuerno del servo que se reclinaban contra la parada baja del servo. Generalmente cuadrado izquierda del servo. Luego cambié la UPD forman 5.556 a 8 – 10. La mayoría de mis servos son 8 para la UPD. Mis programas le permiten encontrar la configuración de servos. La nueva fórmula es 78 * 8 = 624 + 450 = 1074us. Con su ángulo en microsegundos puede utilizar funciones como Pulsout y demora microsegundos. Esto es donde necesitaba Servo matemáticas ser. Una manera fácil de controlar un servo. Me gustaría que tenía amigos a compartir esto con.
Para grupos grandes de servos probar cada uno y poner el mismo tipo (Servo Math) en un subgrupo del grupo más grande. A continuación, puede utilizar una nueva ecuación matemática del Servo para cada subgrupo y control de todos los servos por ángulo. Es lo que hace matemáticas Servo para tus servos. Una ecuación para cada tipo de servo. Si el servo está en este grupo utiliza esta ecuación. Un árbol de lógica para el control de cada tipo de servo por ángulo.
Empecé a jugar con servos cuando recibí mi robot de arranque de letsmakerobots.com. Consigue el kit de Solarbotics.com. El kit tiene un tablero de proyectos Picaxe 28, Motor driver L293, un servo estándar, un telémetro infrarrojo Sharp, 4 soporte de pilas AA y ángulo recto dos motores con las ruedas. El servo mueve el telémetro de lado a lado para la detección del objeto. El Picaxe sólo admite números aproximados para los ángulos de un servo. Me puse a buscar una mejor manera establecer el ángulo de un servo. Servo matemáticas acaba de suceder.
Espero que esto le da nuevas ideas sobre formas de utilizar servos para el arte, automatización y robots. Servos son precisos a un punto. Trabajan para grandes movimientos. Poco se mueve tienen problemas. Mover un servo de 6 grados y usted nada. ¿Por qué? Servos utilizan un potenciómetro (pot) conectado con el eje principal para decirle dónde está el cuerno del servo. La sensibilidad de la olla es demasiado baja para los cambios pequeños. Añadir 20 a su ángulo y hacia él y luego volver a su ángulo.

")











