Paso 5: Regulador del juego
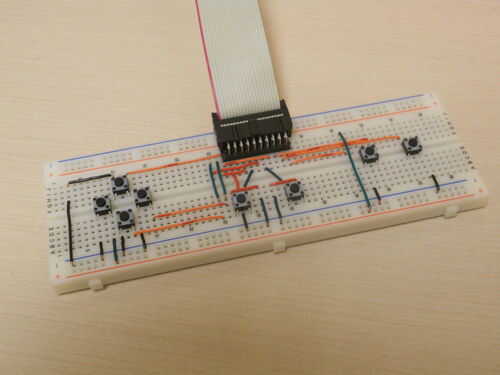

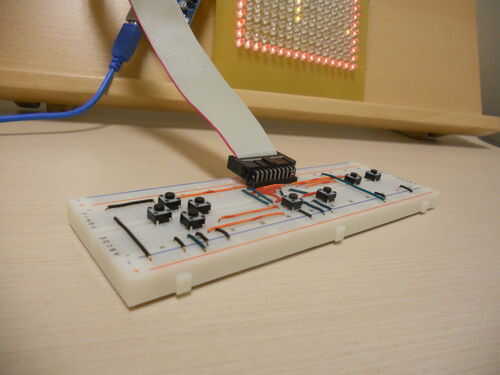
Los chips Atmel que usan los Arduinos tienen una resistencia de pull-up de 20KOhm incorporado. Vamos a utilizar esto para nuestros puertos de entrada. Utilice el tutorial de input_pullup para aprender a usarlo. Los pernos se definen mediante pinMode como input_pullup y set alta con digitalWrite. Este perno de la entrada se puede tirar baja a través de un interruptor conectado a GND. Por lo tanto, en su controlador, debe conectar un lado de cada botón a un puerto de entrada. El otro lado debe estar conectado a una toma de tierra. Cuando el botón está pulsado, digitalRead(pin) se va desplazando bajo y volver a alto cuando se libera.
Los botones también necesitan ser debounced. Revise el tutorial contra rebotes para aprender cómo. El tutorial no hace uso de la resistencia de pull-up incorporado y en su lugar utiliza una resistencia de pull-down externa.













