Paso 1: Reunir los materiales
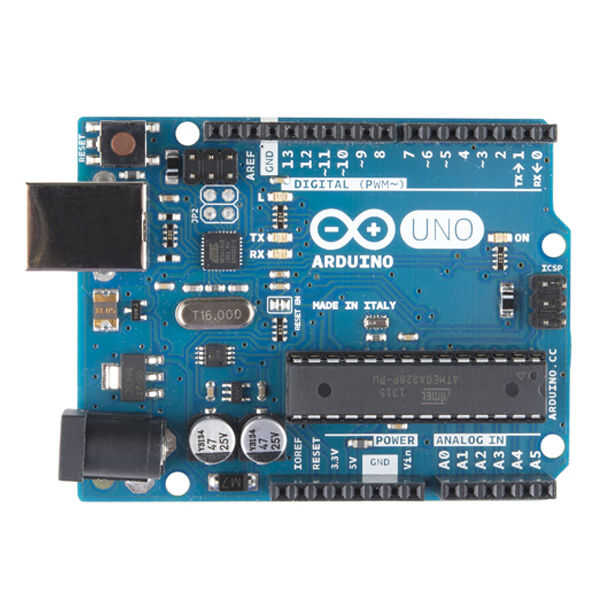
1. sistema de microprocesador (Arduino, Raspberry Pi, Intel Edison)
2. envase/caja (hemos utilizado una caja de acrílico de la exhibición para mostrar más fácilmente el funcionamiento interno)
3. placa y conectores de cables
4. servomotores
5. madera tacos
6. separador placa (permite los actuadores mover hacia arriba y hacia abajo)
7. espuma
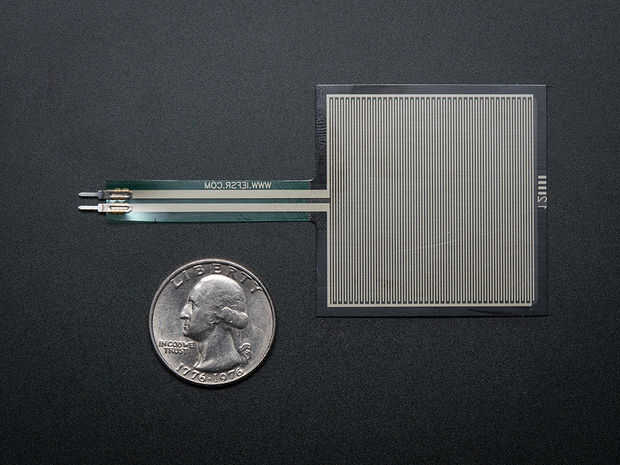
8. presión sensores (Resistor sensible a la fuerza cuadrada (FSR) Interlink 406 de Adafruit.com)
9. neopreno (capa superior protectora)
")


")









