


Crédito: Este proyecto se deriva de bolsillo tamaño de brazo de Phenoptix de Robot.
此專案組裝步驟在此。
﹣本教程包含37個範例, 範例和編程的關係請下載 "手臂教程和編程元素關係.pdf", 適合國中小用拖拉方式來寫程式 (可選 S4A 或 Ardublock), 同時亦附C語言版本供高中職以上玩家學習, 就算您沒有程式基礎, 也可經由這30餘個教程學得控制手臂的必備程式知識。
﹣要學習如何控制 meArm.Joystick(之後簡稱 meArm), 首先要安裝1個軟體和1個驅動程式 (步驟A到C). 安裝完後便有原廠的C語言開發環境。
﹣如果您要用圖形開發環境 (S4A 或 Ardublock 或 Scratch2), 參考步驟 D, E, F.
﹣開始測程式後若要再回復原廠設定, 請到 paso 38或下載meArm_bt.ino (藍牙), meArm_bt2.ino (藍牙 + 自動展示, 按搖桿回復手動), 或 meArm.ino 並在Arduino IDE內燒入。
﹣教程源碼和教程說明皆可一次下載。
(教程源碼.zip, mearm38lessons.pdf)
﹣ 要用安卓手機透過藍牙控制手臂,請下載安卓APP:meArm_Joystick.apk
﹣ 安卓APP源碼 (2),請下載:meArm_Joystick.aia de App Inventor
註:要用藍牙, 需升級藍牙擴充板喔。 藍牙板為HC﹣06。
按此 - 逆運動學 (IK)
Un) IDE de Arduino
B) 安裝驅動程式:
Windows:
雙擊 Arduino_driver.exe 即可。
MAC:
1) 雙擊 ch34xInstall.pkg
2) 如果是 Yosemite (OSX 10.10), 請打開 terminal, 輸入以下後重新開機(其它版本不用此步驟)
sudo nvram arranque-args = "modo de kext dev = 1"
Linux:
按照 CH341SER_LINUX.zip 內所附之 readme.txt 操作即可
C) 確認 開發環境 IDE de Arduino
Windows:
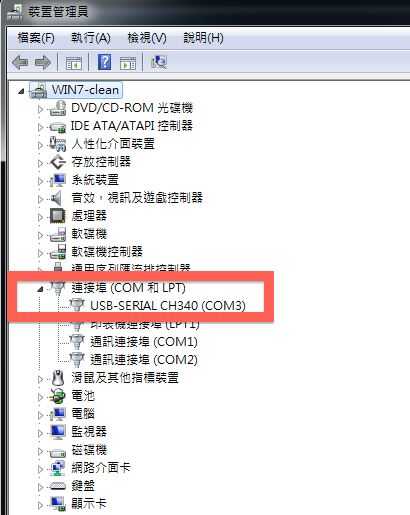
1)系統﹣裝置管理員﹣連接埠(插入機器手臂,確認"CH﹣340"在那一個COM埠)
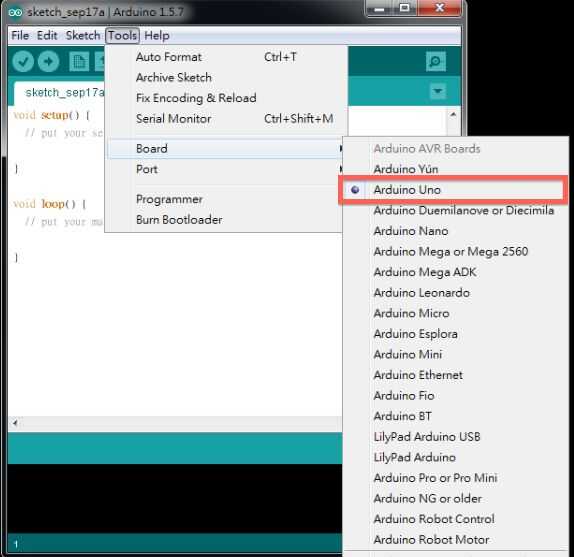
2) tablero 选 "Arduino UNO"
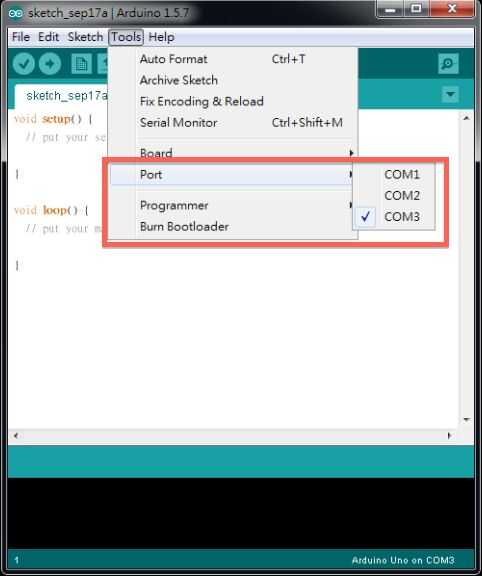
Puerto 3) 选 "CH﹣340" 所在埠, 在此為 COM3
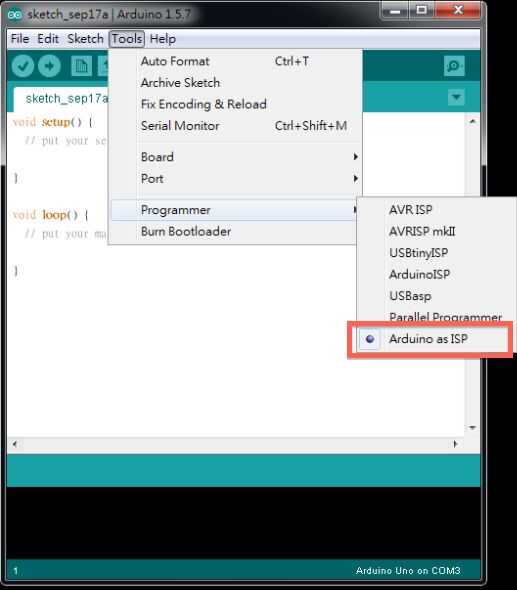
4) programador 选 "Arduino como ISP"
MAC:
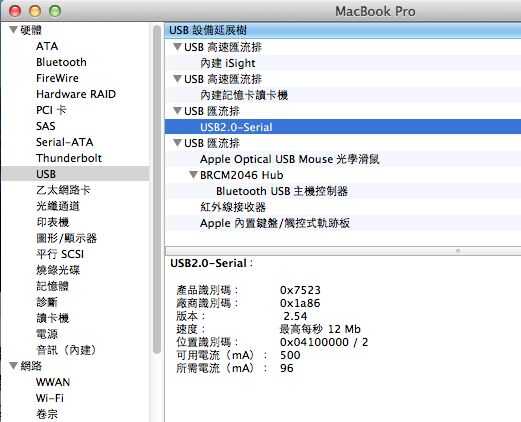
1)應用程式﹣工具程式﹣系統資訊(插入機器手臂,確認"USB2.0-serial"有顯示)
2) tablero 选 "Arduino UNO"
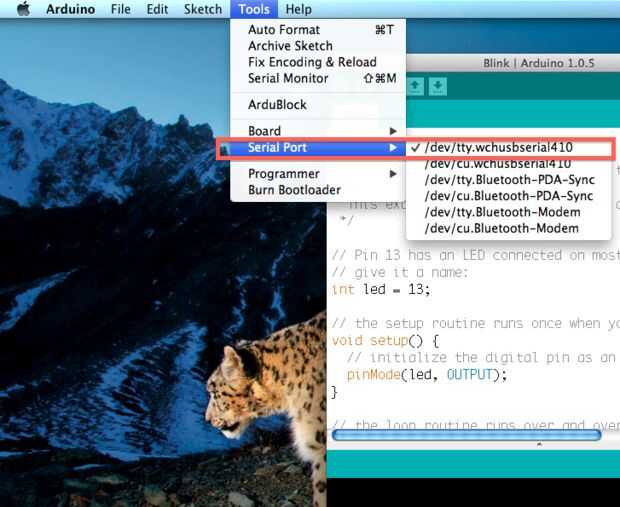
选 puerto 3) "dev/tty.wchusbserial410"
4) programador 选 "Arduino como ISP"
D)S4A
S4A 在 1) 安裝處, 備份 S4A. Imagen 並以所附的 S4A. Imagen 取代之 (若是藍牙板, 請下載S4A_bt. 後取代之 de Image,改名為S4A.Image)
Windows: C:\Program Files\S4A\S4A. Imagen
MAC: Macintosh HD/aplicaciones para/S4A/S4A. Imagen
2) 打開 Arduino IDE, 上傳 S4AFirmware15_meArm.ino 到機器手臂
E) Ardublock
先安裝Arduino IDE, 拷貝到 然後再將 "ardublock-beta-20140828.jar":
Windows 7: C:\Users\lienhungcheng\Documents\Arduino\tools\ArduBlockTool\tool\ardublock-beta-20140828.jar
Windows XP: C:\Program Files\Arduino\tools\ArduBlockTool\tool\ardublock-beta-20140828.jar
MAC: /Users/lienhungcheng/Documents/Arduino/tools/ArduBlockTool/tool/ardublock-beta-20140828.jar
註: 其中路徑上的 "lienhungcheng" 應改為您的 nombre de usuario,更詳細步驟在此.
Scratch2 F) (mBlock特別版, 能連機也能脫機)
先安裝 mBlock IDE
按照最後3張圖設定4個步驟即可。












")
