Paso 2: El brazo (versión de cartón)



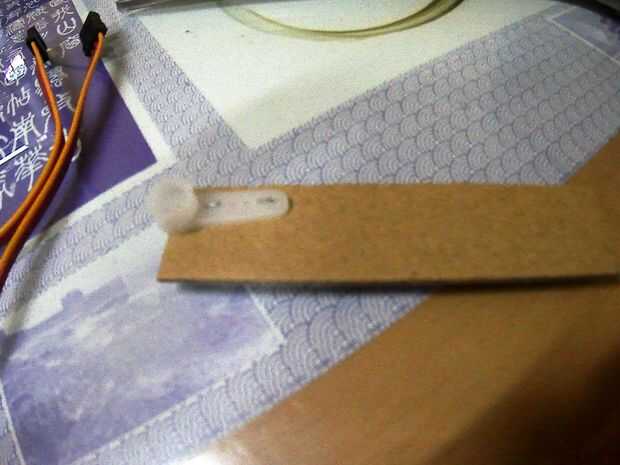
Este es mi primer prototipo de brazo de cartón grueso para las pruebas. Funciona bien, pero no se último durante mucho tiempo depende de cómo densamente el cartón está utilizando. En el siguiente paso le mostrará el brazo plástico, más rígido. Sigue leyendo este paso hasta el final para averiguar cómo están conectados los servos.
Simplemente utilizar cinta adhesiva para unir las partes. El cartón tiene una longitud de 2.5" a 3" cada uno. El cartón también se puede conectar a los cuernos de los servos con las grapas a través de los orificios de los cuernos. Cortar una "V" para un mejor agarre al cuerpo del servo.
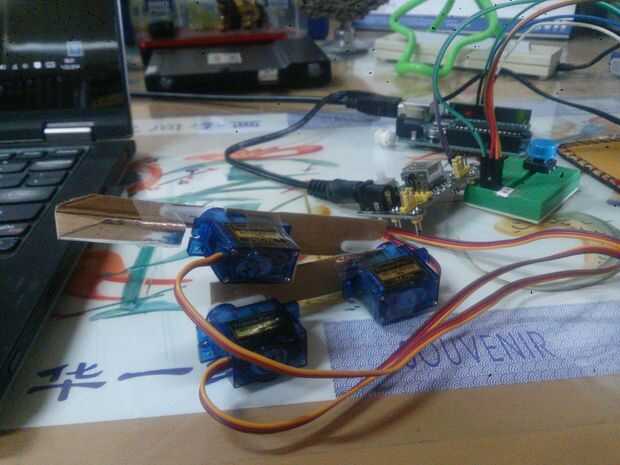
La construcción de brazo completo es como la foto de arriba. Dos servos en la izquierda tienen los cables salen de la izquierda y el servo derecho tiene los cables salen de la derecha. Esto se debe hacer igual que para el movimiento del brazo se determina en el sketch de Arduino.
Ahora vamos a nombre de los servos:
- Derecha inferior: Servo-1.
- Izquierda (media) = Servo-2.
- Superior derecho = Servo-3.
El cartón bajo:
- Lado derecho se conecta al cuerno del Servo-1.
- Lado izquierdo está conectado al cuerpo del Servo-2.
El cartón en diagonal:
- Lado izquierdo está conectado con el cuerno del Servo-2.
- Derecha está conectada al cuerpo del Servo-3.
El cartón de la mano:
- Esta es la palma que sostiene la bola y está conectado con el cuerno del Servo-3 (será dar nueva forma a esta palmera más adelante).





")
")



")


