EDICIÓN 9 de abril: Hemos tenido cierto éxito en cosas que no sean de código y control de motor hoy en día. He averiguado con éxito una manera de controlar la salida del motor con IR y también averiguado cómo utilizar transistores 2n2222 para añadir el voltaje del motor y aumentar la velocidad con poca adición de peso. Estaremos todavía usando el micro de arduino como pesa menos y nuestra meta de peso actual es sub 20 gramos. Creemos que este es el mínimo que podemos hacer el peso para levantar a nosotros mismos y realmente volar. Esto no será fácil. Aún necesitamos ayuda con el código! Alguien que ha usado la MPU6050 para cualquier tipo de experimento por favor ayúdenos! Sentir a PM me gratis con cualquier entrada y propuestas de diseño.
Editar 8 de abril: Tuvimos ot el diseño de lilypad de la zanja. Ahora vamos con un mini ardunio. Después de más investigaciones el lilypad salidas solo 40miliamps a los motores. Necesitamos por lo menos 90 para funcionar a plena capacidad. También hemos probado y los motores no podían levantar el lilypad solo. Así que ya...
volver a la mesa de dibujo.
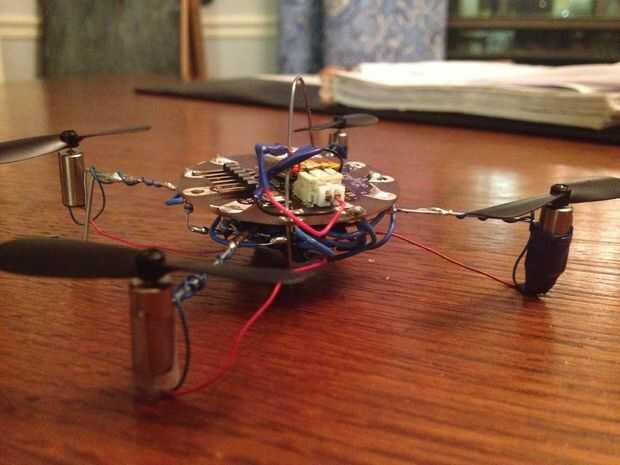
Se trata de un proyecto de un amigo y yo hemos estado trabajando en por las últimas semanas. Estamos construyendo una quadrocopter prueba de concpet que corre de un Arduino LilyPad Simple. Debido a su tamaño pequeño sería muy fácil de reproducir y hacer un pequeño ejército de estas cosas que pueden comunicarse y trabajar juntos como hormigas. Hemos considerado dos formas diferentes de los robots comunicándose entre sí.
1. robot para comunicación del robot se realizaría utilizando leds IR que envían ciertos códigos de un robot a la siguiente así amasando un ejército en muy poco tiempo. Cualquier bot recibir ciertos comandos de un robot o el comandante humano se retransmitan a otros quads cercanas. Los robots entre sí encontraría teniendo 3 receptores IR llevado en los 4 lados del robot. Mediante el seguimiento que IR receptor primero golpeó el robot sería capaz de juzgar a un general "dirección" de donde el primer robot envió el comando.
2. los robots utilizan una señal de 2.4 ghz y nombres de código especiales para cada robot para comunicarse entre sí. Usarían la fuerza de la señal para encontrar otro. Posiblemente también cada robot tiene un RGB led con un clolor especial y buscan entre sí mediante un sensor de color.
Todo esto ahora es conceptual. Todavía estamos trabajando en cómo exactamente todo esto se logra de una manera ordenada. Cualquier Consejo, ayuda, ideas o entrada de cualquier tipo será apreciada grandemente. El siguiente paso será incluir ideas y planes de revisión 1. incluyendo un STL para aplicaciones cad. Revisión 2 que planeamos actualizar a un PCB basado en diseño que pesan menos y ser más funcionales de fácil construcción y pérdida de peso. Por supuesto revisión dos será mucho más caro como necesitamos para PCB caro y super delgada. También necesitamos un horno de soldadura de reflujo para soldar la 32u4s y las virutas de giro a los PCB. Podemos hacer revisión 1 por nuestra cuenta pero si hacemos a R2 podemos ir a kickstarter para la financiación.
Esto no es una promesa que completaremos este proyecto. Mi amigo y yo ambos llevan una vida ocupada y no siempre vamos a estar trabajando en este proyecto en particular. Construcción de robots que se comportan como insectos como hormigas, abejas o termitas no es tarea fácil. Las termitas construyen enormes estructuras ciegas y sin una idea de lo que exactamente cada una de las otras termitas están haciendo alrededor de ellos. Las hormigas también construcción estructuras masivas y enorme complejo subterráneo bases trabajando con otros. Los seres humanos hacen para. Robots de construcción que un hacer esto para nosotros es una tarea compacta que no es fácil. Pero por favor, cualquier entrada o ayuda o ideas son bienvenidas! Necesitamos tu ayuda para completar este! Tus ideas nos importan. No somos expertos en este campo. Noobs algo. El siguiente paso incluye planos e ideas de diseño para los robots de R1. tan pronto como conseguimos tres robots volando y comunicándose entre sí para completar una tarea podremos pasar a R2. También tenemos blog pronto si quieres seguir nuestro progreso. ADVERTENCIA aunque. Probablemente, el progreso será lento. No podemos prometer que todo va a ser perfecto la primera vez.








 tocar sin escudo")




