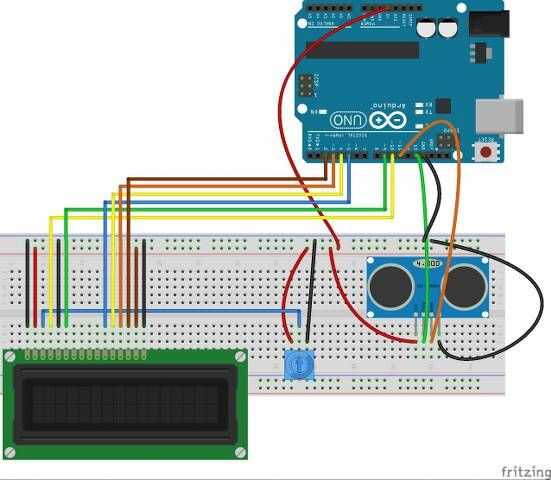
Material de proyecto
Código
#include
LiquidCrystal LCD(10, 9, 5, 4, 3, 2); trigPin int = 13; Pin de viaje sensor conectado al pin 13 de Arduino int echoPin = 11; Sensor eco pin conectado a Arduino pin 11 int myCounter = 0; declarar su myCounter variable y establezca en 0 int servoControlPin = 6; Línea de servo control está conectado al pin 6 flotador pingTime; tiempo de ping viajar de sensor y retorno float targetDistance; Distancia al objetivo en pulgadas float speedOfSound = 776.5; Velocidad del sonido en millas por hora cuando la temperatura es 77 grados. void setup() {Serial.begin(9600); pinMode (trigPin, salida); pinMode (echoPin, entrada); LCD.begin(16,2); Dile Arduino para empezar la fila de la 16 columna 2 LCD LCD.setCursor(0,0); Set cursor de la LCD a la esquina superior izquierda, columna 0, LCD.print 0 de la fila ("distancia:"); Imprimir mensaje en primera fila} void loop() {digitalWrite (trigPin, LOW); gatillo //Set pin delayMicroseconds(2000) baja señal //Let instalarse digitalWrite (trigPin, HIGH); //Set trigPin alta delayMicroseconds(15); //Delay en estado alta digitalWrite (trigPin, baja); //ping ha sido enviado ahora delayMicroseconds(10); //Delay en pingTime de alto estado = pulseIn (echoPin, HIGH); //pingTime se presenta en microceconds pingTime = pingTime/1000000; //convert pingTime a segundos al dividir por 1000000 (microsegundos en un segundo) pingTime = pingTime/3600; //convert pingtime a hourse dividiendo por 3600 ( segundos en una hora) targetDistance = speedOfSound * pingTime; Esta va a ser en millas, ya que la velocidad del sonido fue millas por hora targetDistance = targetDistance/2; Recuerde el ping viaja para apuntar y detrás del objetivo, por lo que se debe dividir por 2 para la distancia real. targetDistance = targetDistance * 63360; Convertir millas a pulgadas por multipling 63360 (pulgadas por milla) LCD.setCursor(0,1); Coloca el cursor a la primera columna de la segunda fila LCD.print(""); Imprimir en blanco para borrar la fila LCD.setCursor(0,1); Set Cursor otra vez a la primera columna de la segunda fila LCD.print(targetDistance); Distancia medida impresión LCD.print ("pulgadas"); Las unidades de impresión. Delay(250); una pausa para dejar que las cosas a resolver}
Detalle de código del proyecto: http://www.projehocam.com/ultrasonik-sensor-lcd-mesafe-olcumu/




 usando el Sensor ultrasónico ~ la")







")
