Paso 4: Construir circuito Breadboarded
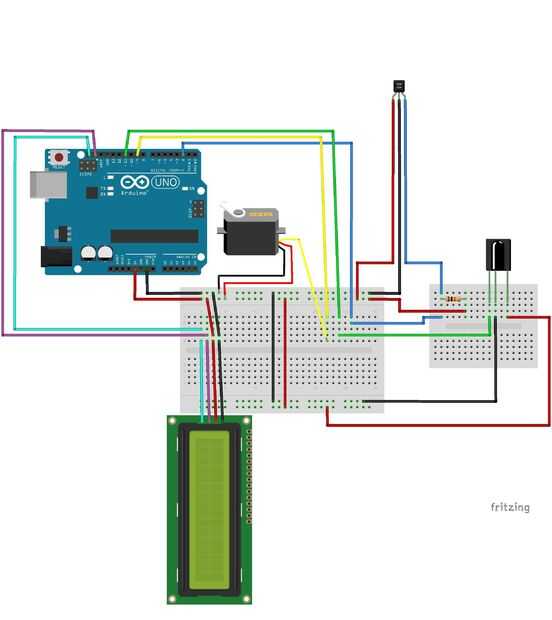
Retirada la imagen subida (Fritzing diagrama) para el cableado detallado de piezas. Utilizar el diagrama de cableado para el Sensor de efecto Hall US1881 Melexis enumerados aquí: http://bildr.org/2011/04/various-hall-effect-sens...
El receptor de infrarrojos que utiliza es la IRM-3638. Ver la hoja de datos de listados aquí para su diagrama de pines:
http://HTML.alldatasheet.com/html-PDF/194444/EVERL...
El LCD CII YwRobot Arduino (también conocido como: LCD I2C) ha incluido el esquema de los terminales en la parte posterior de la pieza. Es muy fácil conectarse solo en el tablero de pan donde los cables se conectan, pero usted tendrá que desconectar más adelante para fines de montaje.
Asegúrese de que obtener el servo estándar y no el micro servo. El micro no tenía suficiente poder de convertir hasta la válvula más pequeña que pude encontrar. Si pisas en tamaño a un servo mayor necesita buscar en fuentes de alimentación externas.
Pines de entrada/salida de Arduino: HES salida al pin digital 2, entrada de Servo para pin digital 9, receptor IR salida al pin digital 11 y 13 LED (incorporado a la Arduino - nada al alambre).









 de leña")



